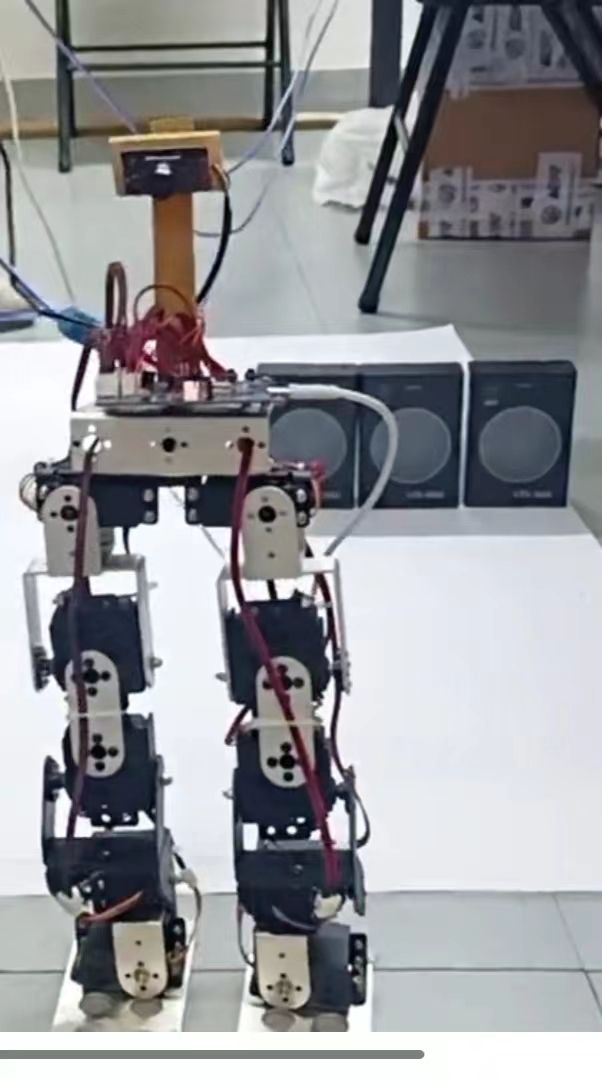
基于ESP32的视觉避障双足机器人

案例介绍
从零完整实现了该项目,从电路设计到机器人搭建以及编码全流程
项目概述:
本项目为一款基于ESP32微控制器的小型双足避障机器人,能够自主感知环境并实时避障。
功能特点:
采用 舵机 实现双足行走,支持平衡与稳定的动作控制。
配备多个 传感器 进行环境检测,具备自主导航与避障功能。
上位机通过无线通信与机器人交互,提供远程监控与控制功能。
视觉处理:
使用 OpenCV 实现实时图像处理和目标识别,增强机器人的环境感知能力。
上位机开发:
上位机由 C# 开发,具备友好的用户界面,支持与机器人通信及控制命令的发送。
个人贡献:
负责硬件搭建及传感器集成。
开发嵌入式系统中的运动控制与避障算法。
设计并实现上位机软件,集成 OpenCV 进行图像处理。
案例图片

相似案例推荐
其他人才的相似案例推荐
-

消防报警联动控制器
消防报警联动控制器是按照《GB4717-2005火灾报警控制
-

智能设备运维平台
该平台主要由现场实施运维使用,用于合规化管理流程,并实现数字
-

电动车管控装置以及物联网平台
1. 电动车管控装置是一个基于4G的智能设备(并且有测试基于
-

汽车上感知算法落地
改产品为感知算法,在汽车上落地的一个演示demo;包含了底层
-

SiC扫频激光测厚系统
在该项目中我主要负责激光测厚设备的软件系统开发工作,开发了一
-

SimpleBCG 3轴云台
使用PID进行参数调整,对负重物品进行自稳操作,可用于自稳拍
-

基于**的相机保护罩装置
本项目主要研制了基于风洞试验中如何对保护罩内相机的保护措施的
-

Agv小车
项目描述:本次项目主要是基于ESP32芯片为基础来对小车进行
-

上位机视觉开发
C#上位机应用开发是指在工业生产中,通过计算机软件实现对生产
-

通信终端开发
FreeRTOS/UCOS III/BareMetal开发
-

对讲机
该项目完成的内容: 1、自主读懂原理图与电路图 2、手动
-

车联网平台
此项目主要是给工程车提供硬件,版本升级,设备定位、添加、事件
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

