
案例介绍
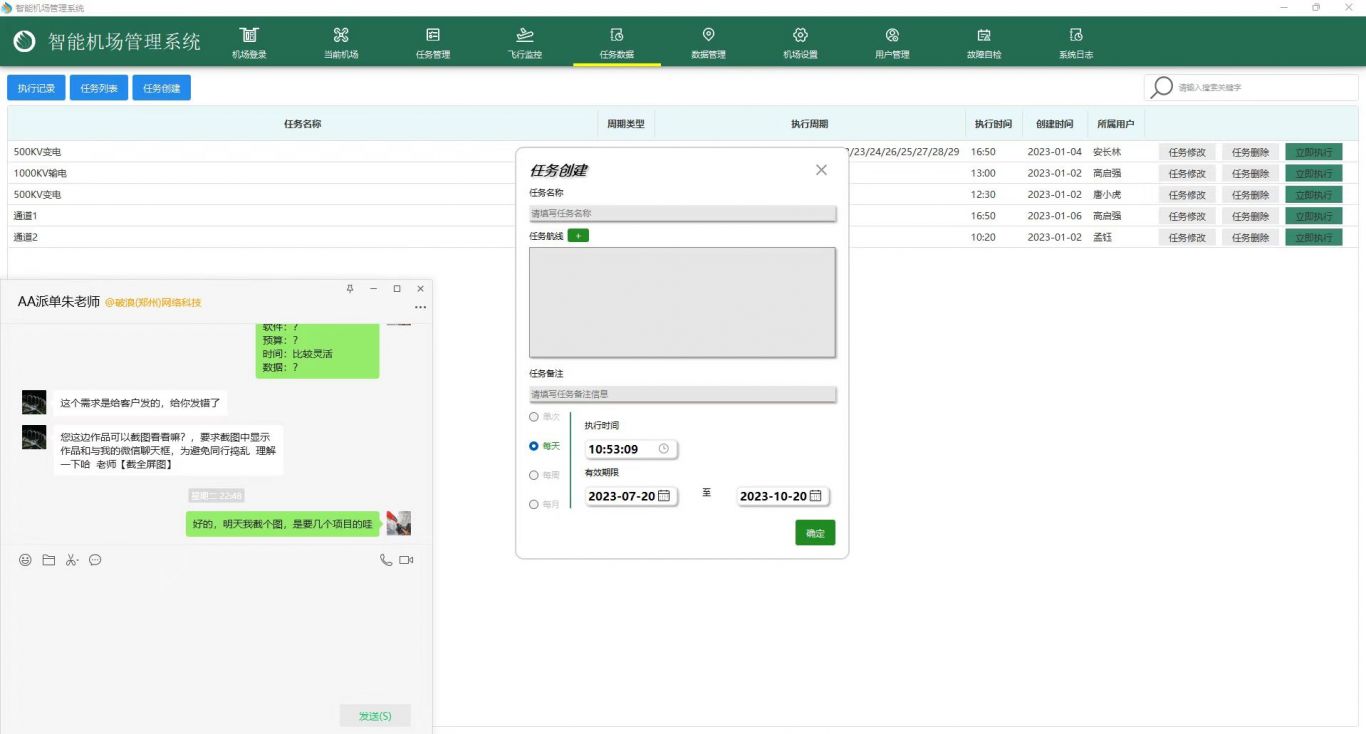
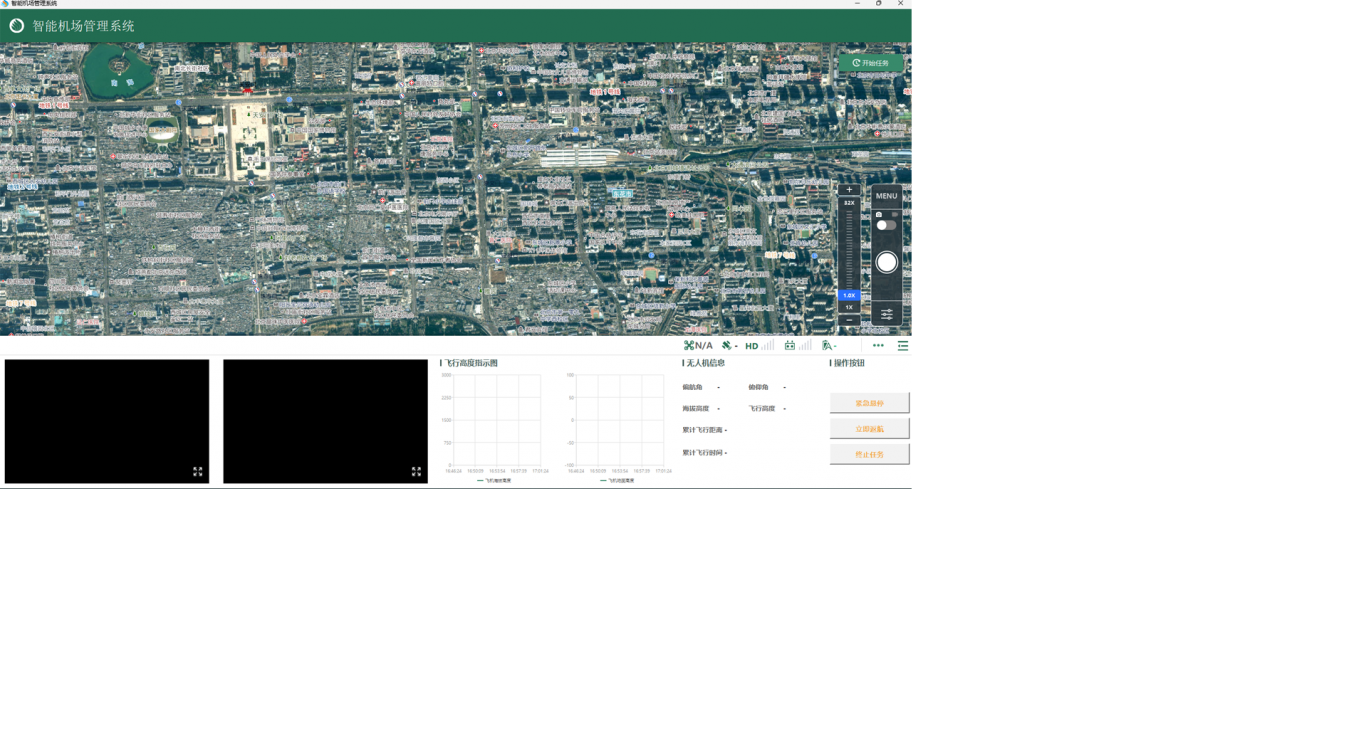
无人机自主巡检,按照周期性的执行任务,并上传任务照片,系统分为服务端,主要负责数据存储和pc端客户端数据通信,遥控器安卓端,负责控制无人机飞行执行任务以及数据回传,嵌入式FreeRTOS,主要负责对机场的舱门开关,无人机的充放电设备控制,温湿度数据监测,空调的开关控制等,工控机端,主要负责对安卓端、嵌入式FreeRTOS、服务端的通信,类似一个消息中间件功能,还负责视频数据流的编解码和推流,还有无人机自动精准降落控制算法
主要负责是工控机的开发以及pc客户端的拉流工作。基于aarch64的jetsonNX,使用nvidia的GPU的nvenc和cuda特性处理视频流,使用poco框架控制,使用opencv做数据标定,采用相对位移以及pid振荡算法控制无人机精准降落,PC端采用Qt开发基于C/S模型,使用ffmpeg拉流视频流显示监控设备
案例图片
相似案例推荐
其他人才的相似案例推荐
-

开关电源
该设计主要是应于某种特殊场合的开关电源,并且已经经过某站取得
-

开关电源
该设计主要是应于某种特殊场合的开关电源,并且已经经过某站取得
-

控制主板
该主控板以STM32F407为控制中心,32路DI开关量输入
-

摄像头查找器
摄像头查找器APP由本人0到1完整开发,主要功能包括:探寻局
-

线下教育智能打卡系统
产品是一款蓝牙网关产品,用在培训场所的门店中,用户可以通过A
-

蓝牙盲文点选器
产品是一款供盲人使用的键盘和显示设备,通过上面的6个不同的盲
-

激光防撕裂装置
本项目中,主要负责基于STM32的装置控制板(控制电机转动,
-

无线LORA系统
本人负责本系统的整个软件开发调试,本系统分为三个部分:低功耗
-

可视化大屏
可视化大屏,监控工厂数据,数据透传,平台控制,可数据收集,可
-

3D智慧物流平台
负责项目框架制订、项目进度把控、核心代码的编写、人员的工作安
-

工业安全系统
在保障工厂园区内的员工安全和遵守操作规范。该系统通过部署视频
-

工业主控屏
基于linux系统和LVGL开发的工业主控软件,具备文件读写
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

