
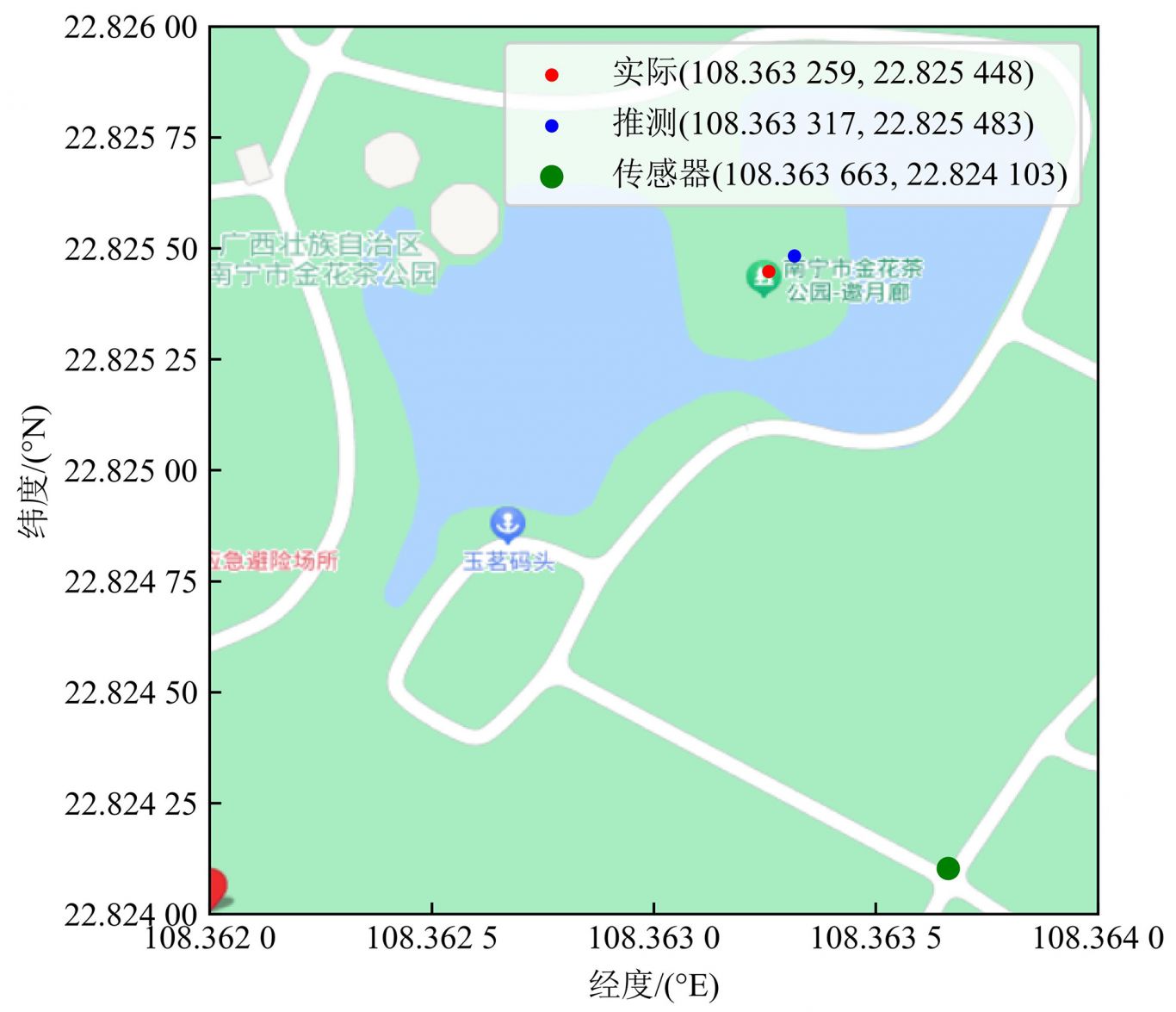
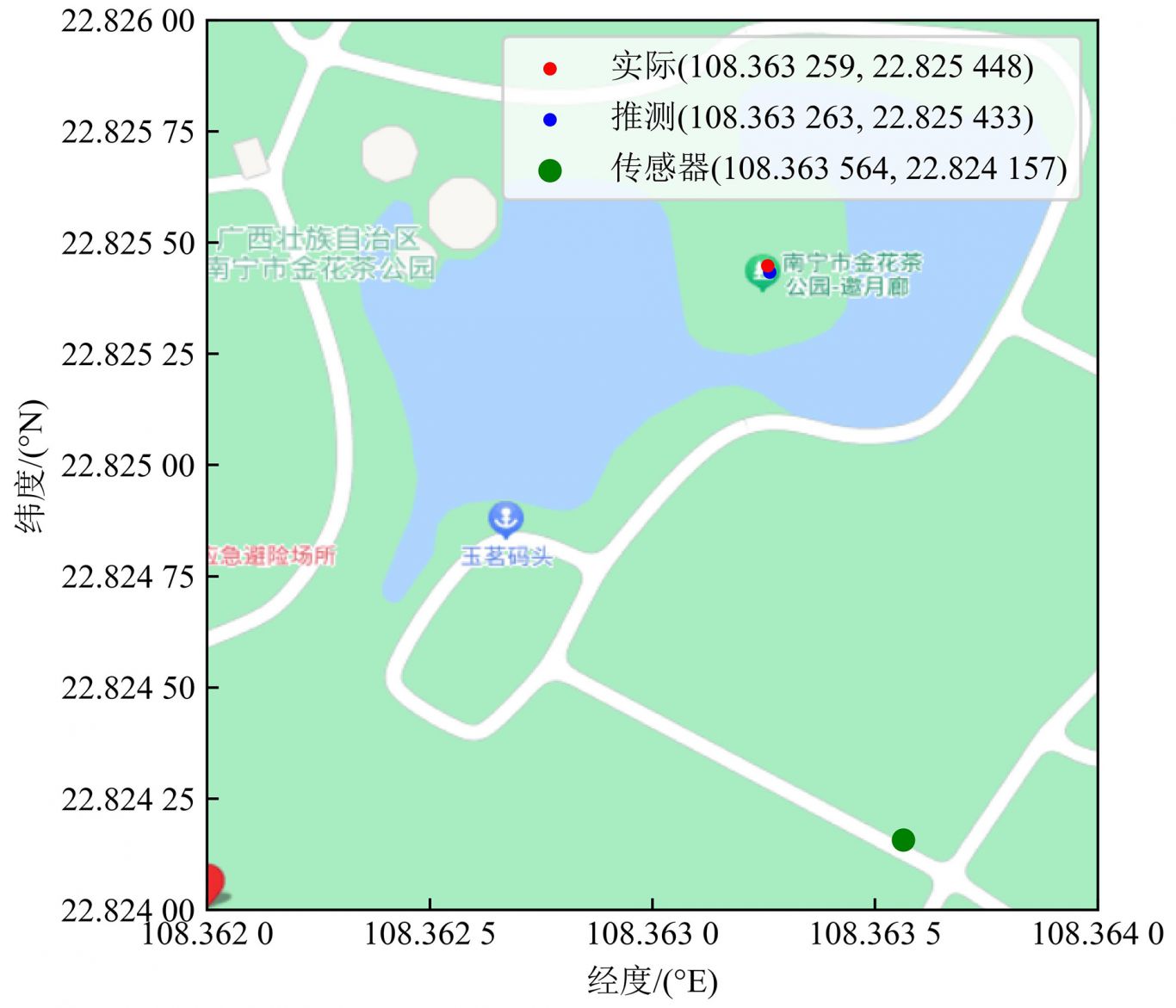
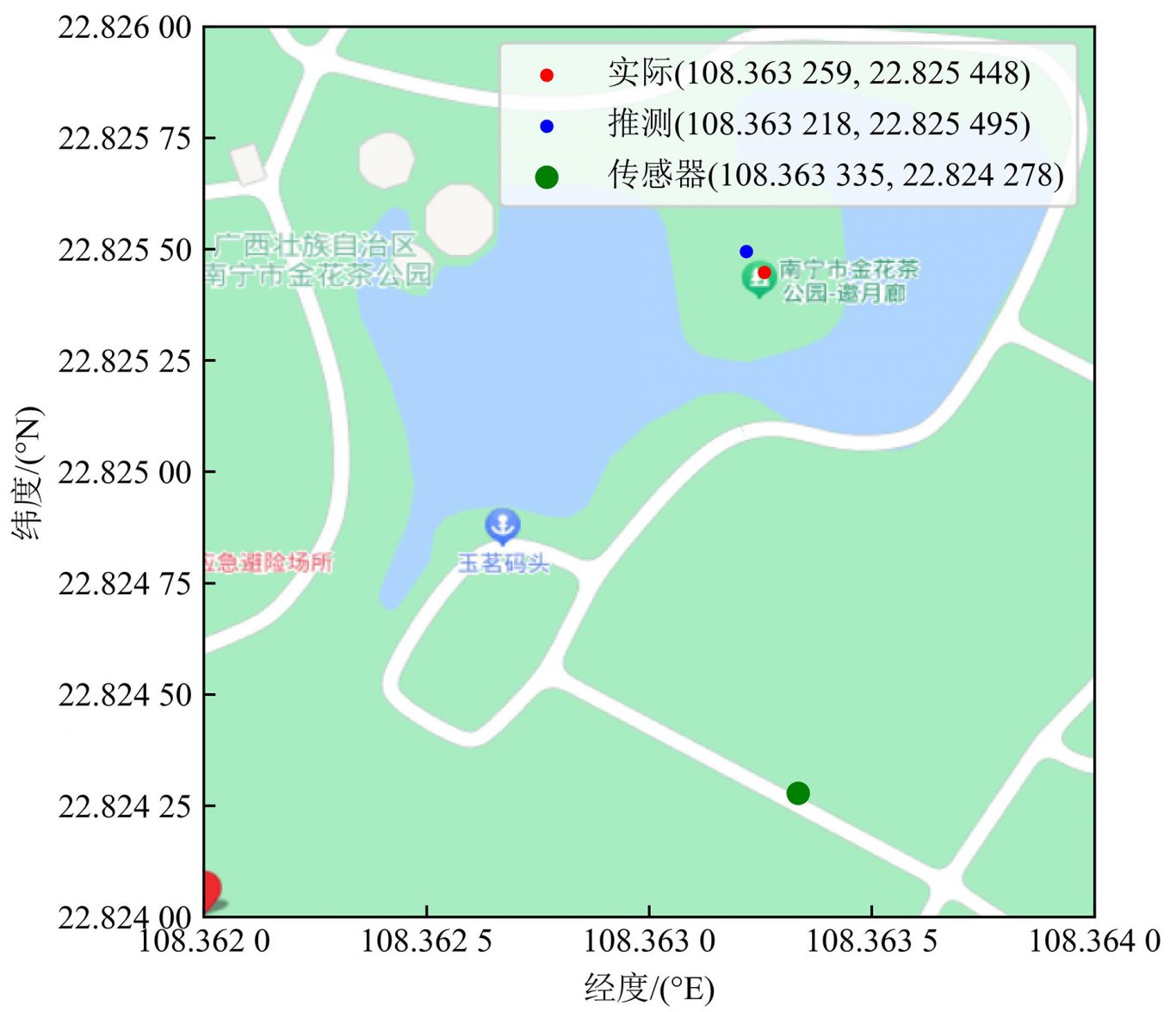
案例介绍
为了解决基于深度Q网络(DQN)的路径规划任务面临的样本效率低下、收敛速度慢、内存需求量大等问题,更快更好的在复杂环境中准确跟踪目标。在深度强化学习技术的基础上,提出了在移动传感器上使用D3QN算法实现对目标的路径规划。D3QN算法有三个方面的优势,一是通过一种优先经验回放机制,提高样本效率;二是通过将动作的选择和动作的评估分别用不同的值函数来实现,降低过估计的影响;三是通过改变网络架构,提高收敛速度和效果。并且采用GNU Radio软件平台和Python语言进行仿真验证。通过实验表明,与DQN方法相比,D3QN的方法能够有效地降低系统能耗、提高处理任务的实时性,提供了显著的速度改进和鲁棒性。
案例图片

相似案例推荐
其他人才的相似案例推荐
-

双向DCDC自然冷却
双向DC/DC电源转换模块,基于CLLC拓扑,高压侧320~
-

mipi的ser-des驱动调试
项目背景 我参与了一个大型汽车嵌入式系统项目,主要负责开发
-

汇川工业-电梯触控一体机
整个产品一人解决从板级HW到OS到中间件到上层应用,从硬件芯
-

半导体数字前端仿真EDA
作为一共6名团队成员之一的key 成员: 1. 负责开发基
-

新型电力系统人工智能开放创新平台
该项目由国网信通产业集团有限公司的信产埃森哲牵头,联合信产研
-

一种中药厂空压站监测系统设计
作品旨在实现对现场中药厂空压站的设备进行工作参数监测和远程启
-
")
机场仿真系统(强化学习环境开发)
PVGSim的目标是为机场交通模拟提供一个解决方案,分析或模
-

CNN+LSTM气象雷达回波分析
Seq2Seq模型早期用于自然语言处理任务(NLP),Cha
-

开发者论坛
该系统是一个校园技术交流平台,采用Java和MySQL数据库
-

NACHI机器臂控制系统开发
项目描述: 该项目旨在开发一套Python自动化程序,用于
-

西铁行服务平台小程序
该项目用于高铁列车上乘车扫座位的二维码来根据座位号进行点餐下
-

后台管理系统+大屏
该项目是后台管理系统+大屏,后台管理系统是一些增删改查,大屏
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

