
案例介绍
项目简述:室外巡检机器人搭载多种传感器,能够在公园、电厂、园区及高速应急车道等场景自主安全
行驶,巡检机器人高速预警版本支持高速事故预警,远程执法,巡逻警戒等功能,极大提高了交警执法
安全性。
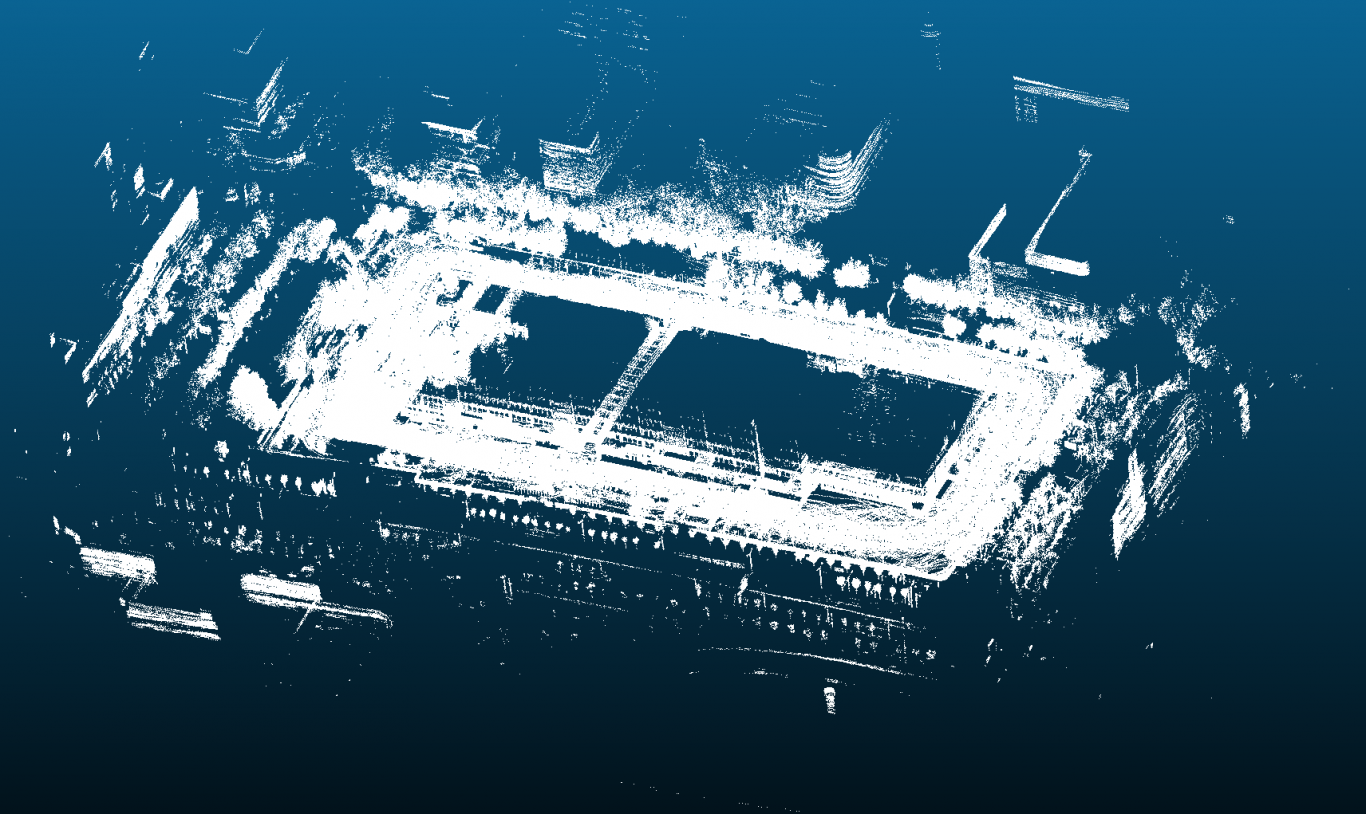
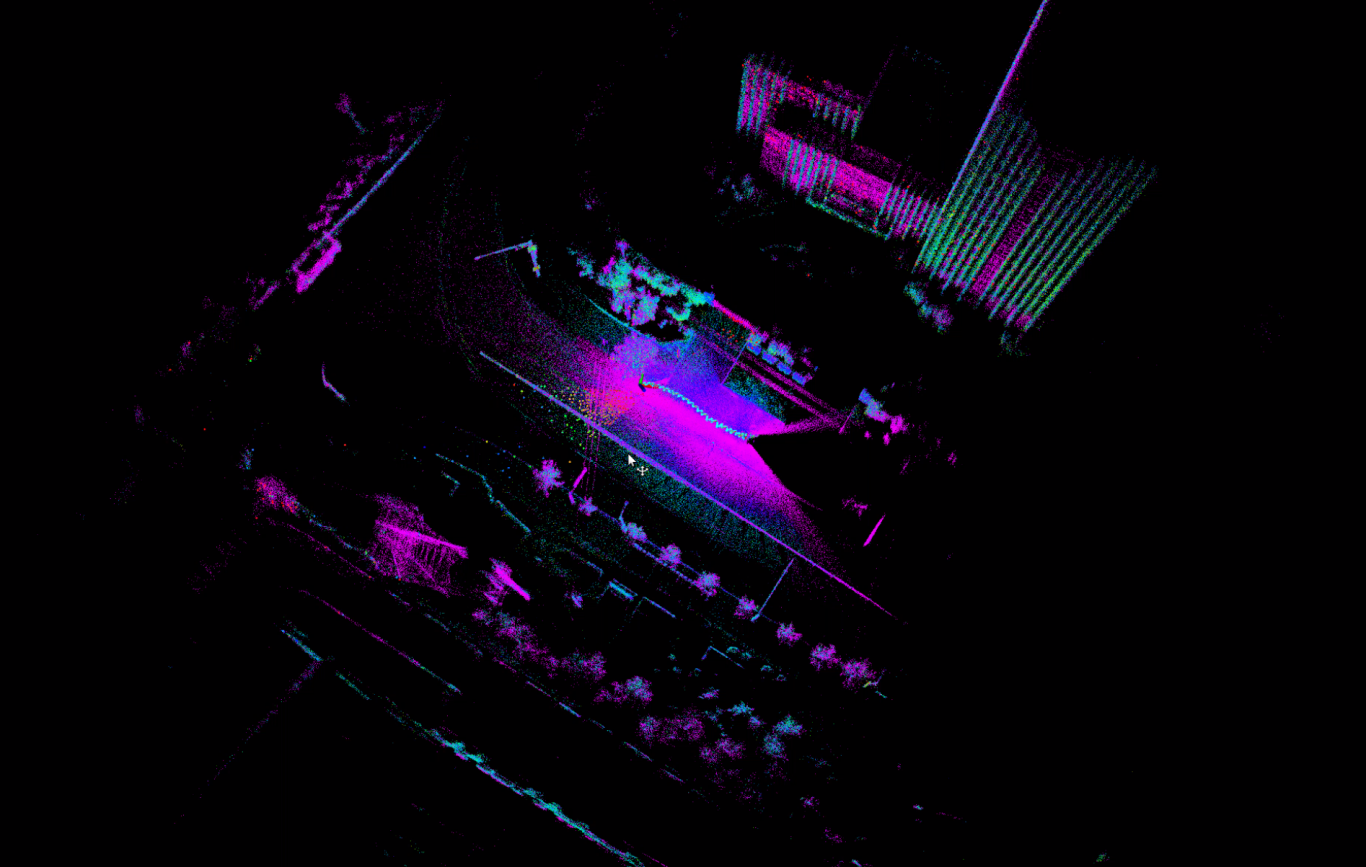
项目职责:在本项目中主要负责基于多线激光雷达,融合GPS、IMU、里程计等传感器的室外大场景建图
及定位算法研发,负责巡逻全局路径规划算法研发及较高车速下(3m/s)阿克曼底盘的循迹及运动控制算
法研发;负责较高车速下多方向智能遇障减速停车算法研发;负责基于单目视觉的充电引导算法研发。
负责开发基于高速特殊场景的定位导航算法,融合RTK定位及局部点云地图进行超远距离巡逻
案例图片
相似案例推荐
其他人才的相似案例推荐
-

坐席辅助平台
坐席辅助系统,可辅助坐席处理用户反馈意见,并配合知识库进行统
-

机械臂
小型机械臂开发 从头开始开发,从贴片,选型,采用32步进电
-

无人机
无人机功能: 职位:研发 职责:foc电机调试,双目摄像
-

“恩智浦杯”智能车
“恩智浦杯”全国大学生智能车竞赛 参赛组别:室外电磁组。
-

多智能体群智决策算法设计
项目完成了多智能体的高效搜索和围捕任务。本人全程负责智能体基
-

AI知识库
基于 LLM 大语言模型的知识库问答系统,提供开箱即用的数据
-

AIChat
项目名称:智能聊天助手 项目简介: 本项目是一个
-

微信公众号
微信公众号建设,本项目是使用公众号渠道,提供快捷商务合作入口
-

项目考核例题
通过西门子PLC的编程实现人机界面互交场景的设计,使现实设备
-

正反转的人机互交界面
通过西门子PLC软件编程,实现对电机正反转功能的实现,通过H
-

正反转的人机互交界面
通过西门子PLC软件编程,实现对电机正反转功能的实现,通过H
-

做过多方毕业设计
我是一名专业的前端开发人员,熟练掌握 Python、HTML
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服