
案例介绍
在 SenseTime 实习期间,我参与了自动驾驶感知系统的研发,主要负责自动泊车和车道线检测模块。
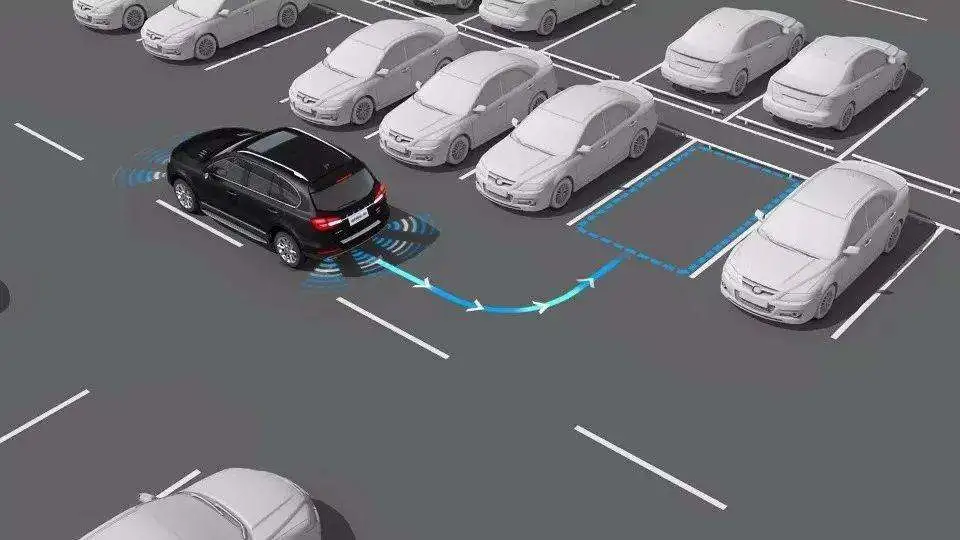
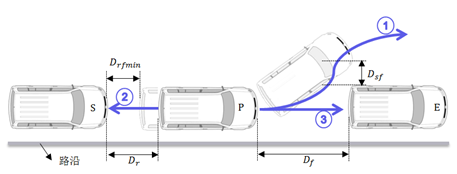
自动泊车: 设计并实现了用于自动泊车感知的道路实例分割端到端建模流程,通过准确分割道路区域,为车辆提供可靠的泊车引导。
车道线检测: 提出了实时 ARD 车道线跟踪框架,实现了对车道线的实时、稳定跟踪,并将其成果转化为专利。此外,还设计了一个改进的 3D 车道线检测框架,在复杂城市场景中取得了优于现有技术的性能。
通过这些工作,我为自动驾驶感知系统的研发做出了贡献,提升了系统的可靠性和安全性。
案例图片
相似案例推荐
其他人才的相似案例推荐
-

工业控制系统
采用西门子PLC、伺服电机、变频器以及接近开关气缸对射反射传
-

上位机软件
自动化产线总控上位机,通过接口获取机台信息,通知agv小车和
-

爬取
此作品能够免费管看电影,并且能够自动收集电影评价,给用户真实
-

爬取
这个作品能够免费管看电影并且爬取电影评价,是在省赛中创作,在
-

爬取
该项目是学校组织的一个比赛,在规定时间内做出能爬取一个月内使
-

嵌入式AI部署
双目RGBD相机平台搭建,基于廉价双目RGB相机模组,通过嵌
-

可视化大屏
工业可视化3D大屏+全局变色 全局主题变色和3D可视化大屏
-

近期完成的项目
1.需求调研 2.解决方案 3.招投标 4.产品培训
-

近期完成的项目
1.客户需求调研 2.解决方案 3.招投标 4.产品培
-

ERP系统
本项目主要为物料的入库、图纸、生产工艺的生成、成品出库 前
-

AI知识库
基于 LLM 大语言模型的知识库问答系统,提供开箱即用的数据
-

多智能体群智决策算法设计
项目完成了多智能体的高效搜索和围捕任务。本人全程负责智能体基
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服