
案例介绍
# 项目介绍
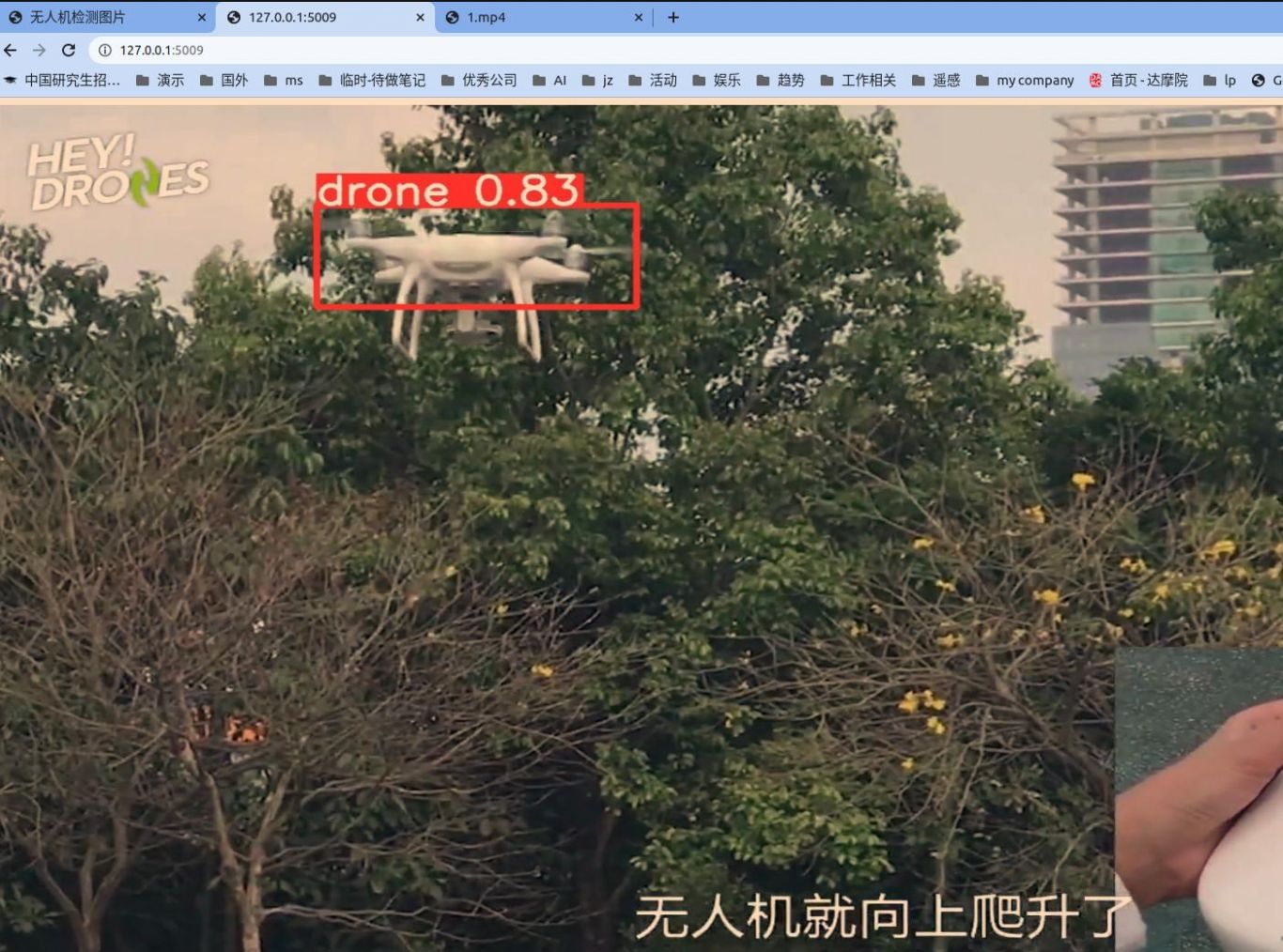
无人机项目,无人机搭载nvidia jetson边缘计算板子,进行实时识别。
jetson上电,程序自动启动拉取rtsp或者usb获取视频流,每秒获取3张图片进行算法分析,算法分析之前每3秒保存一张图片,
每5秒保存一张识别后图片,同时识别后的图片实时添加gps信息(需要gps硬件模块);最终保留完整的识别视频。
### 功能简介
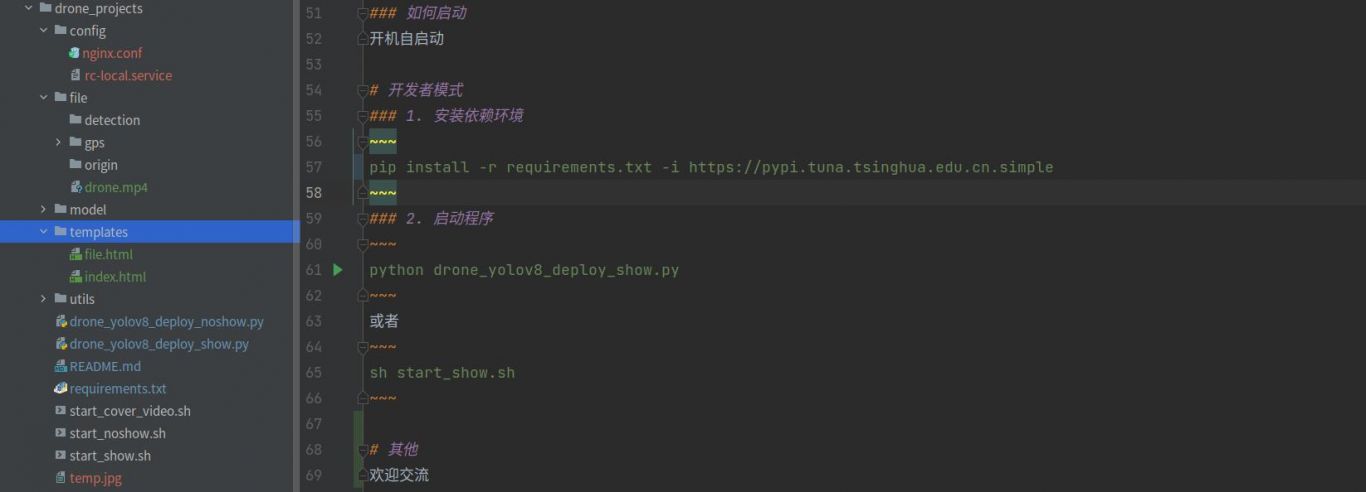
1. 程序开机启动
2. 从RTSP流或者USB摄像头获取视频流,进行算法识别。识别前每3秒保存一张图片,每5秒保存一张识别后图片
3. 识别后的图片添加gps信息,gps信息从北斗+gps设备获取
4. 保存识别后的视频流为`.avi`格式,需要经过转换成`.mp4`格式才能播放,参考`start_cover_video.sh`
5. 网页端实时查看识别后的视频流,视频延迟在1秒内
6. 网页端实时查看保存好的识别结果图片
### 如何启动
开机自启动
案例图片


相似案例推荐
其他人才的相似案例推荐
-

AI创作
通过对接大模型的方式,实现用户输入文字就可以让模型输出用户预
-

AI智库
AI智库平台(AI Multi-functional Pla
-

物联网平台
(1)后台管理系统,单页面应用,其应用是小程序。(2)vue
-

买买鸭
1.该项目使用HBuilderX来开发uni-app2.采用
-

大巡防
1.该项目使用 Vue-cli 搭建项目基础框架,确定、技术
-

车流量识别
基于目标检测算法和ByteTrack 车辆跟踪算法来完成车流
-

印象派数字人名片
印象数字人名片 项目周期: 2023-3 至 20
-

AI中台
星火智算平台作为新型智能化基础设施服务平台综合解决方案,是面
-

摩尔纹识别算法
服务能够识别出单帧图像中是否存在摩尔纹,并返回图片类别以及该
-

树叶是否遮挡电线算法
配电通道树障识别 通过输入图片,算法自动定位和识别图片上的
-

车联网平台控制端
远程监控和管理: 车联网平台允许车主或车队管理员远程监控车
-

机器学习解决的企业与政府的金融信贷政策
介绍:对近些年信贷的相关数据进行分析,通过机器学习相关算法模
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

