
案例介绍
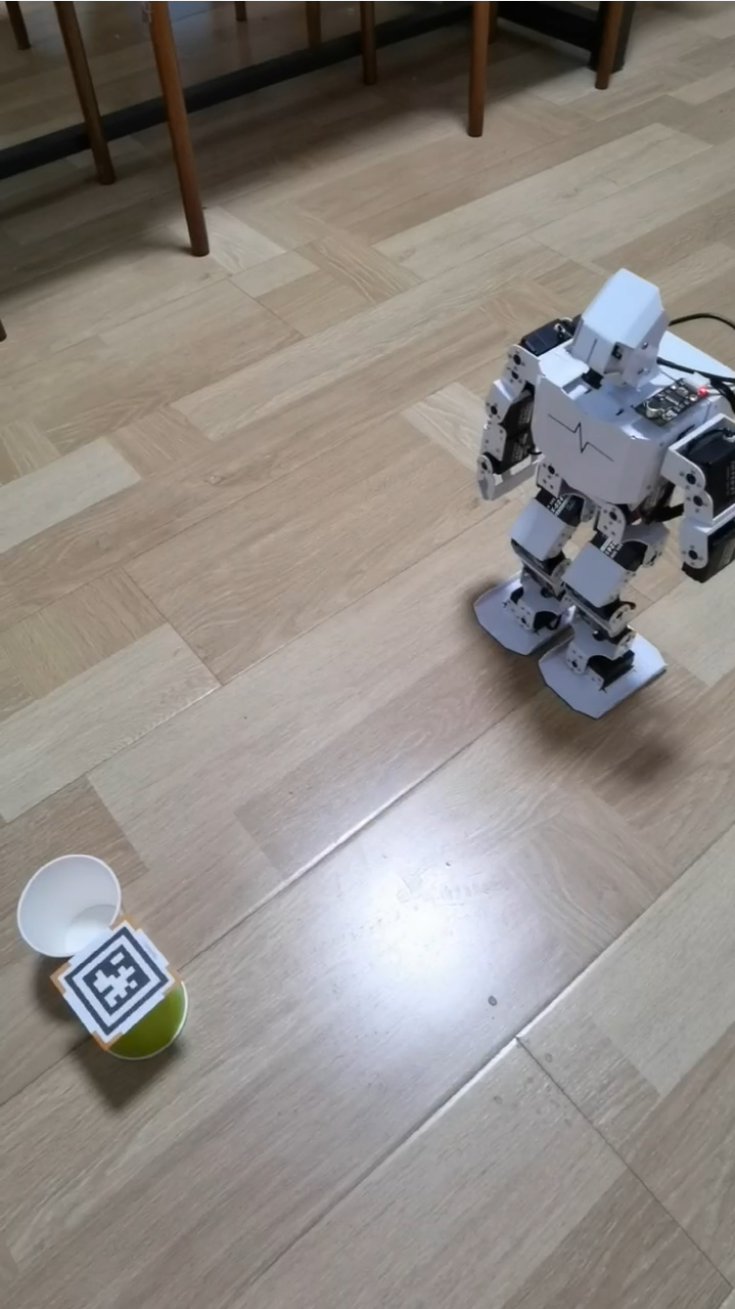
项目介绍:可编程控制的人形或仿生类行走机器人。根据公布的任务和现场发布的任务,参与现场展示交流的学生能够运用各种传感器包括视觉(大小、形状、颜色)识别、材质(铁质、塑料)分类、位置(坐标、方向)确定等,设计制作一款双足人或仿生类多足机器人,并具备对指定物品进行分拣与搬运的能力。
技术覆盖:系统软硬件设计、硬件部件选取组装安装、树莓派舵机上位机安装调试、opencv&AI模型视觉开发、各类传感器扩展使用集成、ROS1&2开发等
解决方案:提供各类信息学竞赛方案,包括系统设计、图文视频教程和源代码,线上线下同步教学等
案例图片


相似案例推荐
其他人才的相似案例推荐
-

无人车
在公司工作期间主要负责无人外卖配送车地盘的嵌入式开发部分,其
-

机器人配置工具
1、使用Vue3+Typescript+Element-Pl
-

智能机器人巡检监控系统
1、使用 ZRender 实现机器人二维地图,展示机器人巡
-

变电站巡检机器人
(1)开发基于深度神经网络的机器人图像识别算法,用于检测当前
-

龙净环保智能煤场一体化平台
(1)实现基于多设备拼接点云数据的在乡浅3D建模方法,料场多
-

改进JPS全局路径规划算法
改进JPS算法的搜索策略,提升其全局算法的规划效率。 在规
-

下肢康复机器人
下肢康复机器人是一种在急性期康复医疗机构进行下肢运动疗法治疗
-

巡检机器人控制app
该app主要用于工业巡检机器人的控制,包括机械臂的控制和云台
-

客户管理平台
该项目主要是一个通讯行业的管理后台 ,主要框架是vue3,
-

嵌入式AI部署
双目RGBD相机平台搭建,基于廉价双目RGB相机模组,通过嵌
-

爬取
该项目是学校组织的一个比赛,在规定时间内做出能爬取一个月内使
-

爬取
这个作品能够免费管看电影并且爬取电影评价,是在省赛中创作,在
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

