
案例介绍
线性模型预测控制(Linear Model Predictive Control,简称线性MPC)是一种先进的控制策略,它通过预测未来系统行为并优化控制输入来实现对动态系统的精确控制。线性MPC是一种基于模型的控制方法,它利用线性系统模型来预测未来的行为,并根据这些预测来计算最优控制输入。这种方法的核心在于,它不仅考虑当前的系统状态,还考虑了未来一段时间内的系统动态。模型建立:首先,需要建立一个描述系统动态的线性模型。这个模型通常以状态空间的形式表示,能够描述系统状态随时间的变化。
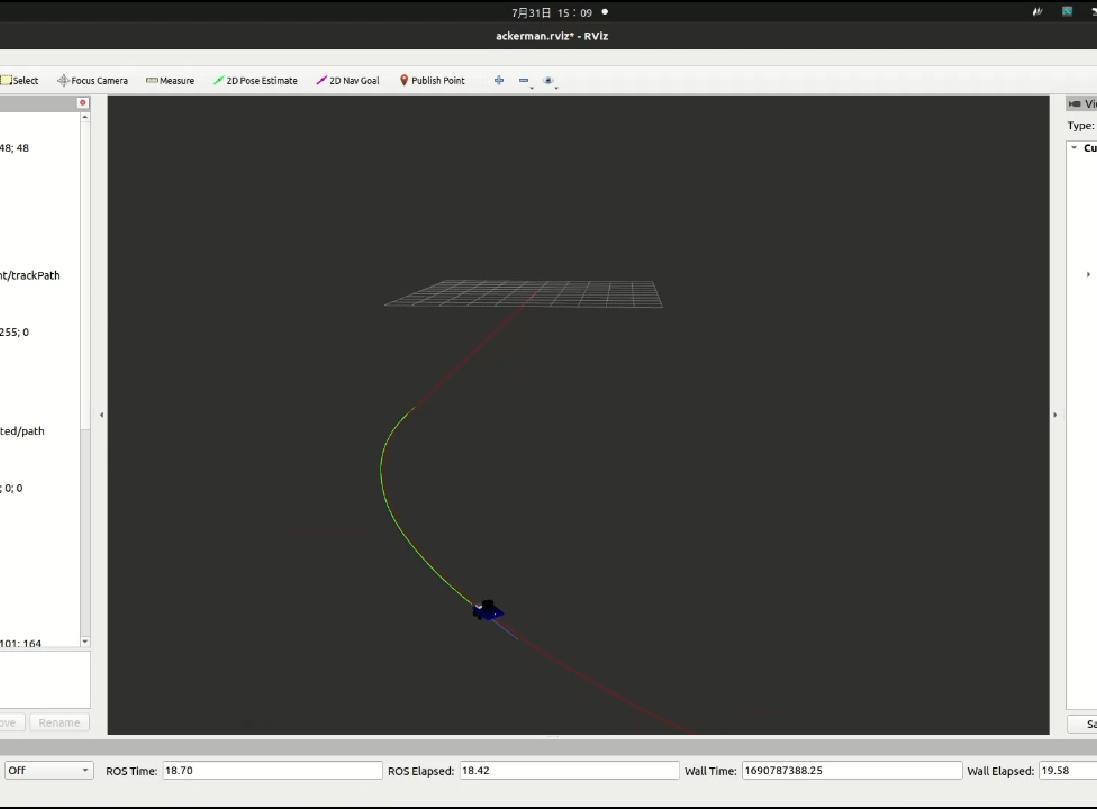
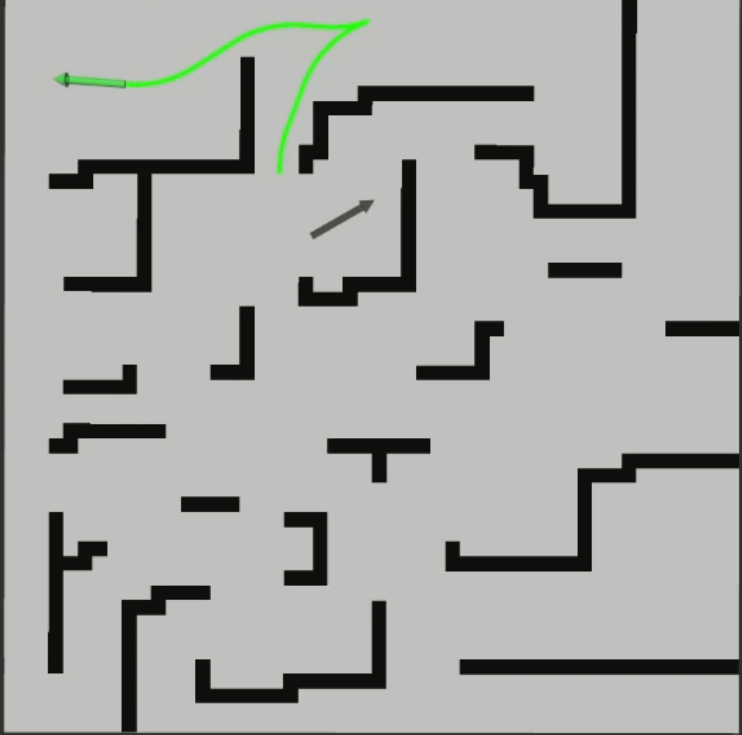
预测:线性MPC通过线性模型来预测未来一段时间内系统的状态。这通常涉及到求解一个线性方程组或者使用离散时间的状态转移矩阵。优化:基于预测的未来状态,线性MPC使用一个优化算法来计算控制输入,以最小化或最大化某个性能指标,如成本函数。这个优化问题通常是二次规划问题,可以通过多种数值方法求解。反馈控制:优化得到的控制输入被应用到系统上,并且随着时间的推移,根据系统的实际响应,模型预测和优化过程会不断重复。
案例图片
相似案例推荐
其他人才的相似案例推荐
-

壹沓科技CubeRPA
承担RPA项目重构owner,CubeRPA通过模拟人的界面
-

jaka机器人控制软件
为客户定制一款机械臂控制软件,所控制的机器人型号为Jaka
-

多自由度机器人系统
作为总工程师,本人在此工程中完成了需求分析、软件架构设计、硬
-

料架识别
使用2D激光对料架进行识别,在ARM架构开发识别程,识别结果
-

栈板识别
使用3D相机对两孔栈板进行识别和定位,识别数据传给导航程序后
-

yolov8检测web服务端
yolov8检测web服务端: 1. 具有用户管理页面、y
-

ChatGPT诗词汇
基于 ChatGPT 的诗词聊天是指利用开放式AI模型(如G
-

通用视觉检测项目
通用视觉检测软件框架,基于c#和halcon开发,可以实现常
-

极片检测算法
使用传统opencv预处理,目标检测,语义分割等功能,可用于
-

3D点云处理及软件开发
上位机软件快速开发,基于c#,c++语言,可实现图像,点云处
-

影刀
web前端初级证书 金智维k-rpa 证书 影刀初级
-

dvr工具
1.DVR是一套录制工具,能够录制摄像头,RTK的数据并能够
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

