多自由度机器人系统

案例介绍
作为总工程师,本人在此工程中完成了需求分析、软件架构设计、硬件电路绘制、嵌入式软件开发和上位机软件开发、及系统测试订正的工作。
本项目完成了至少2个自主开发的程序模块的设计,分别是不定长、不定参数个数的通信协议解析;多节点系统的控制逻辑;
该机器人系统,为应对将来可能产生的业务变化(包括传感器的变化、数据传输部件的变化、受控部件的变化等),在硬件端抽象了业务模块,使得业务在将来扩展之时有良好的可扩展性。
又受到功耗的要求,为节约系统资源,不能使用诸如ros等的系统进行设计,故此采用裸机编程的方式进行程序的设计。
系统分为3个角色:
(1)下位机主机:完成上位机命令的接收、解析和任务分发、完成从机的数据收集和打包,并通过可扩展字段的通信协议发送给上位机,供其决策使用
(2)下位机从机(多个):系统中将来接入的从机个数不定,但其从机个数上限足够,将
(3)上位机:上位机负责获取下位机采集、上传的数据,对其进行分析后,输出控制策略和命令到下位机,控制其运动。
我为本项目开发了一款手工操作的上位机软件,使得调试和演示可以方便地进行,开发框架为QT,使用QML进行界面构建,使用QMLEngie获取QML的视图对象,使得C++后台可以和QML前端完成层次分明的交互。
在完成上位机开发任务的同时,使得其可读性和扩展性高。
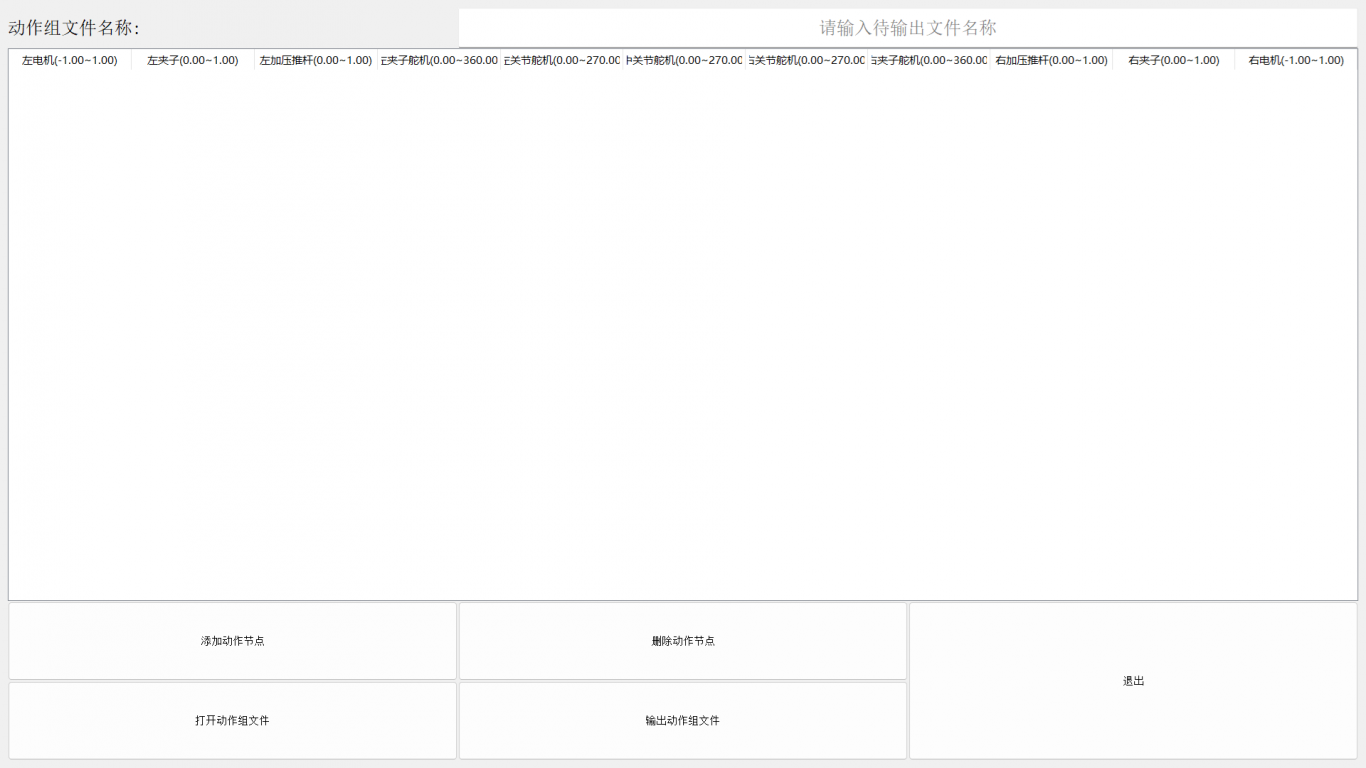
该上位机有自动功能,自动模式的命令下达后,会按照用户定制的动作节点组去要求下位机完成动作,因此除上位机本体外,还开发了动作组定制软件。
案例图片

相似案例推荐
其他人才的相似案例推荐
-

料架识别
使用2D激光对料架进行识别,在ARM架构开发识别程,识别结果
-

栈板识别
使用3D相机对两孔栈板进行识别和定位,识别数据传给导航程序后
-

yolov8检测web服务端
yolov8检测web服务端: 1. 具有用户管理页面、y
-

yolov8检测客户端
基于yolov8设计的可用于windows和linux系统的
-

自动驾驶中间件开发
项目描述:自动驾驶自研中间件可以对上层算法模块提供良好的支撑
-

agv小车驱动控制模块架构设计和开发
项目描述:基于ROS平台,完成AGV小车车端控制软件的驱动重
-

壹沓科技CubeRPA
承担RPA项目重构owner,CubeRPA通过模拟人的界面
-

路径规划
在日常生活中,无论是人类还是机器,我们都需要在复杂的环境里找
-

小车控制
线性模型预测控制(Linear Model Predicti
-

ChatGPT诗词汇
基于 ChatGPT 的诗词聊天是指利用开放式AI模型(如G
-

通用视觉检测项目
通用视觉检测软件框架,基于c#和halcon开发,可以实现常
-

极片检测算法
使用传统opencv预处理,目标检测,语义分割等功能,可用于
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服