yolov8检测客户端

案例介绍
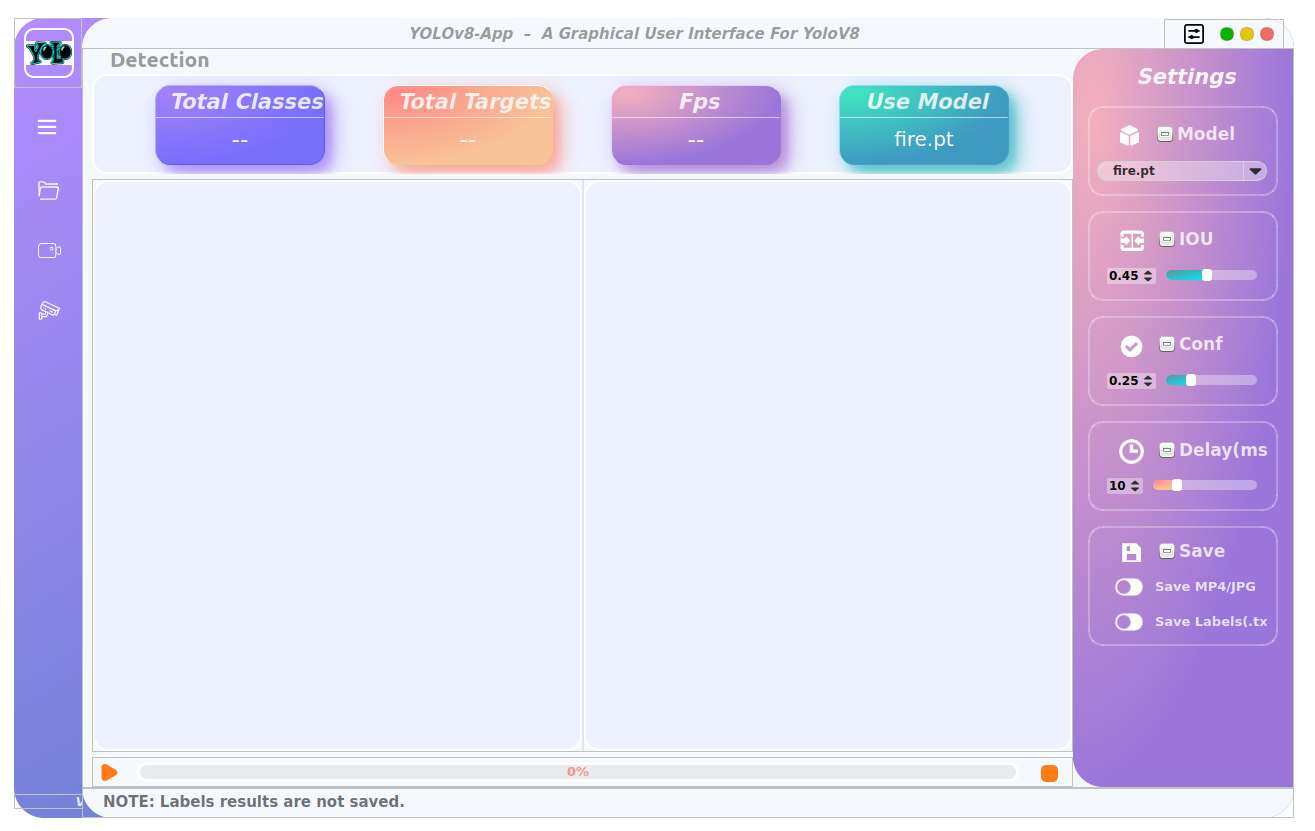
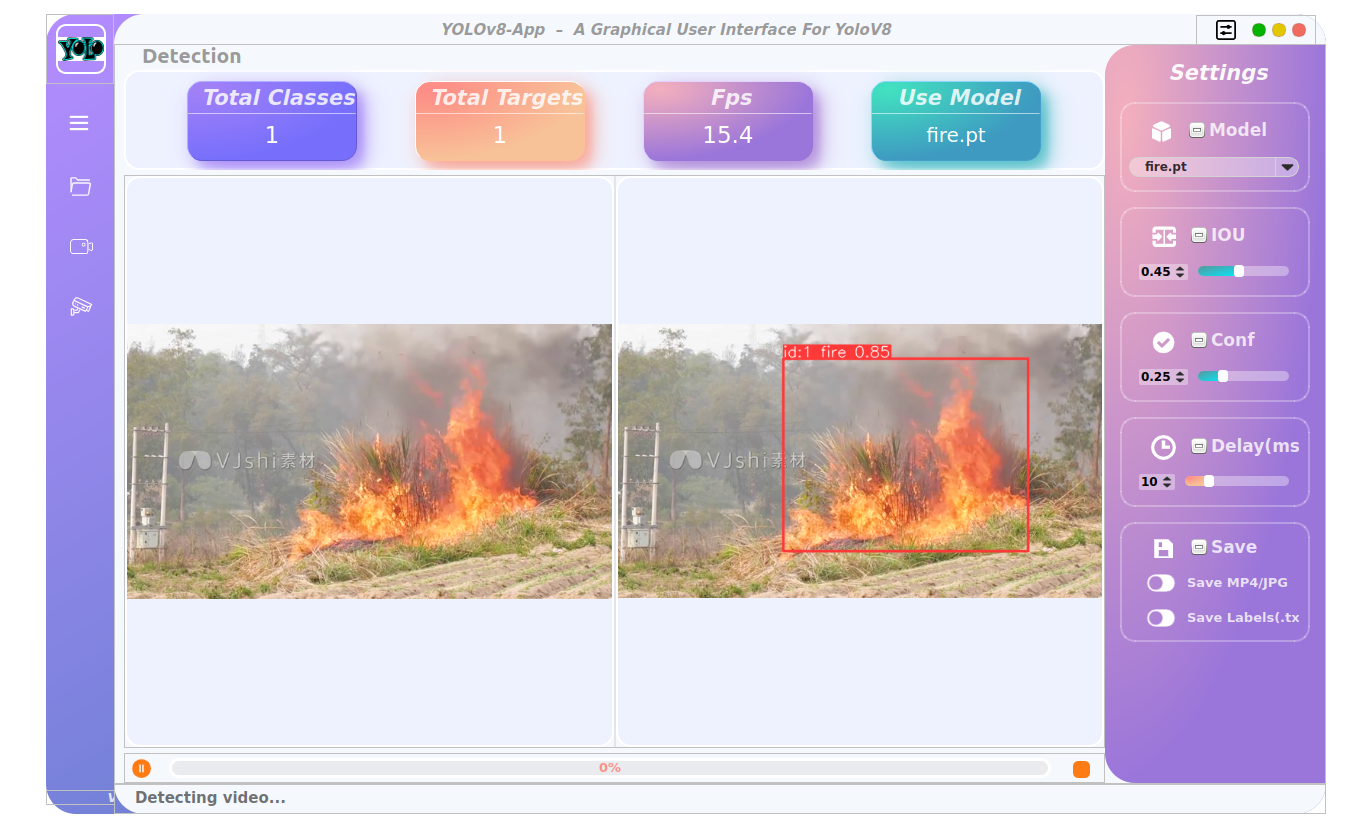
基于yolov8设计的可用于windows和linux系统的图像识别客户端
1. 支持本地视频文件输入、打开本机摄像头、RTSP和rtmp流媒体输入检测
2. 支持切换yolo检测模型
3. 支持设置检测参数
4. 支持检测结果图片、视频及label TXT文件保存
案例图片

相似案例推荐
其他人才的相似案例推荐
-

自动驾驶中间件开发
项目描述:自动驾驶自研中间件可以对上层算法模块提供良好的支撑
-

agv小车驱动控制模块架构设计和开发
项目描述:基于ROS平台,完成AGV小车车端控制软件的驱动重
-

无人机
比赛时使用的四旋翼,主控使用STM32F407VGT6经过修
-

智能物流小车
主控为stm32f103zet6,通过光电对光识别出黑线进行
-

今天国际楼宇递送平台
项目名称: 楼宇递送机器人、送餐类机器人、消毒类机器人 职
-

虚拟主播
数字时代,数字产品泛滥,互联网平台多不胜数。数字人就是你在不
-

栈板识别
使用3D相机对两孔栈板进行识别和定位,识别数据传给导航程序后
-

料架识别
使用2D激光对料架进行识别,在ARM架构开发识别程,识别结果
-

多自由度机器人系统
作为总工程师,本人在此工程中完成了需求分析、软件架构设计、硬
-

jaka机器人控制软件
为客户定制一款机械臂控制软件,所控制的机器人型号为Jaka
-

壹沓科技CubeRPA
承担RPA项目重构owner,CubeRPA通过模拟人的界面
-

路径规划
在日常生活中,无论是人类还是机器,我们都需要在复杂的环境里找
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服