
案例介绍
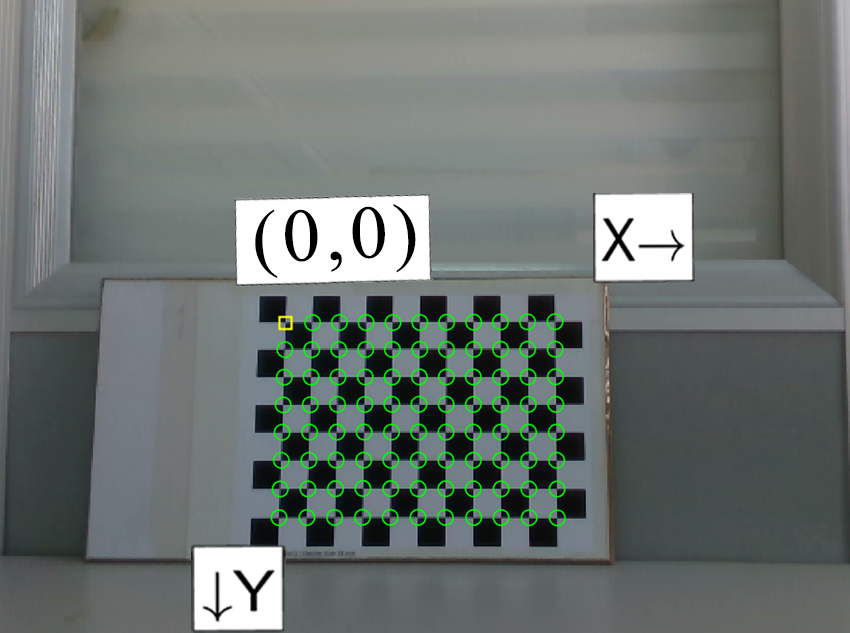
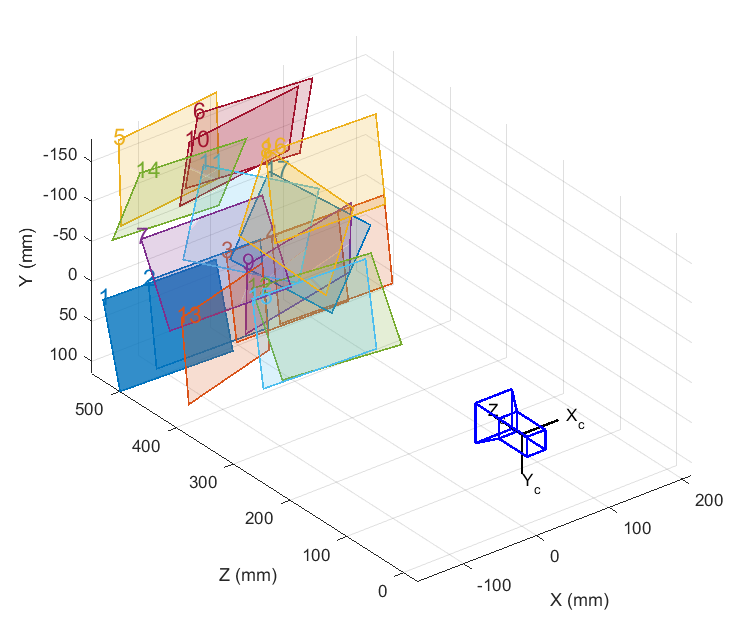
手眼标定方式 1.固定相机拍照 手眼标定做什么: 1.1【已知条件】摄像机坐标系下校正对象的位姿;可以通过校正图像 获取; 1.2【已知条件】机器人坐标系下机器人工具的位姿; 1.3【未知条件】获取工业摄像机坐标系下为机器人坐标系的位姿; 1.4【未知条件】获取机器人工具坐标系下校正对象坐标系的位姿; 求出未知条件,再加已知条件,从而获取机器人坐标系下校正对象的 位姿;要抓取一个物体,机器人坐标中的夹具位姿必须与机器人坐标 中物体的位姿相同;
案例图片
相似案例推荐
其他人才的相似案例推荐
-

四川省机器人大赛循迹车项目省一
负责代码编写,使用tc264进行开发,循迹使用了总钻风摄像头
-

e起听歌小程序
作品设计是为了符合当代年轻人,情侣或者朋友闺蜜打造的,可以在
-

自动化产品
(1)基于数字孪生的产品设计,能够对产品三维设计、加工过程、
-

电动车充电特性交互式问答系统
电动车充电特性交互式问答系统 1、能够通过文本描述的形式与
-

NGD百度智能客服
智能客服对话平台是百度智能云面向企业用户推出的一款智能化人机
-

基于深度强化学习的机械臂快速训练方法
将深度强化学习算法与机械臂结合,探索不通状态和奖励设置方式对
-

视觉车道线融合激光路沿
独立完成Lidar curb融合视觉curb的算法方案设计
-

利用深度相机稠密建图
利用D435I深度相机以及ros进行稠密点云建图,对算法落地
-

HDL实验
该项目由一个用 Verilog-A 编写的理想模数转换器和一
-

虚拟主播
数字时代,数字产品泛滥,互联网平台多不胜数。数字人就是你在不
-

今天国际楼宇递送平台
项目名称: 楼宇递送机器人、送餐类机器人、消毒类机器人 职
-

智能物流小车
主控为stm32f103zet6,通过光电对光识别出黑线进行
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服