智能抓取蜘蛛机器人

案例介绍
负责硬件设计与制造:设计和构建机器人的物理结构,包括六足的机械结构、传感器布局、电源系统等。在设计过程中考虑机器人的稳定性、机械运动性能和负载承受能力。
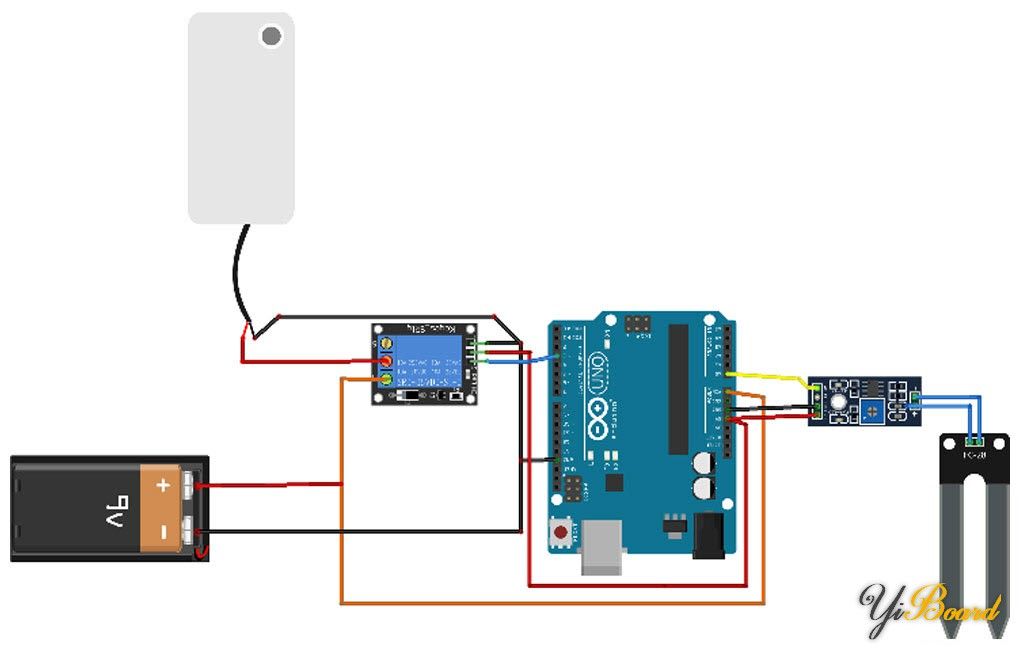
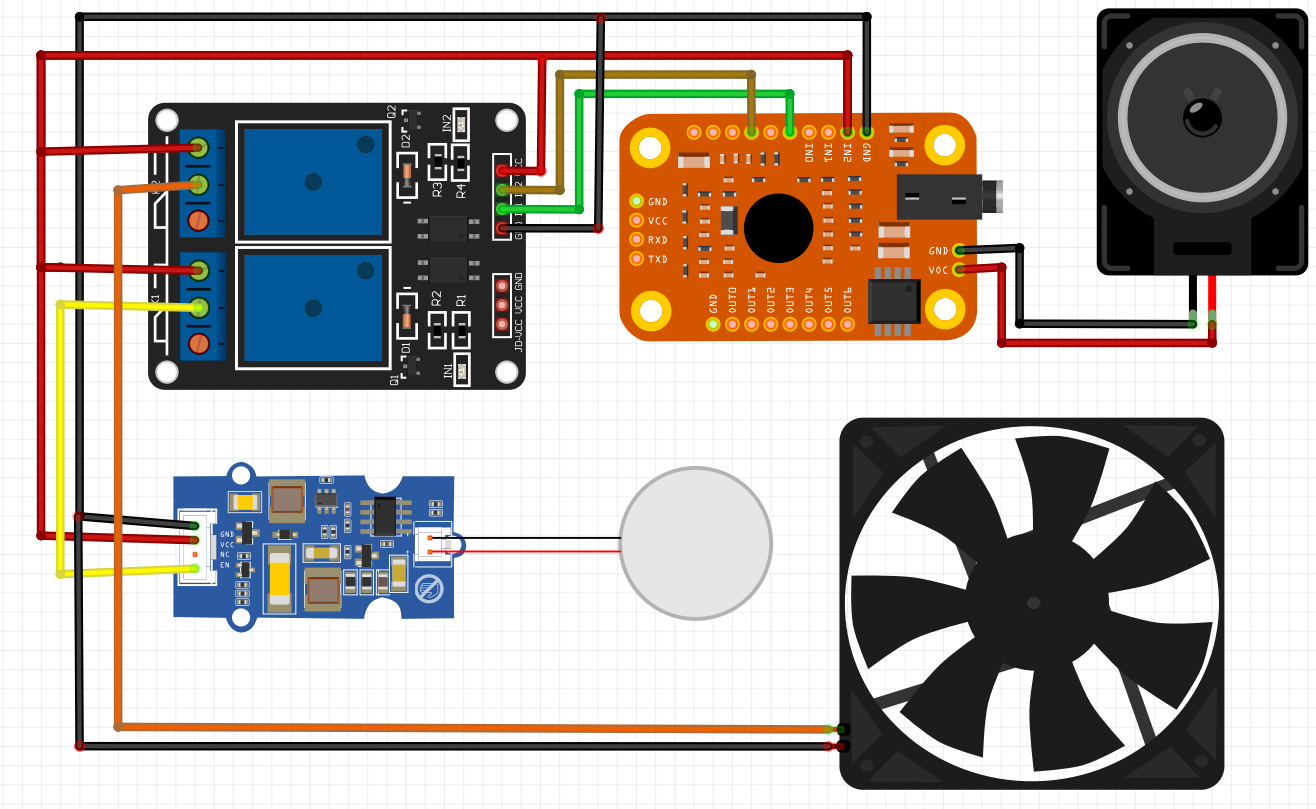
负责设计电子系统:配备合适的电子设备,如微控制器、传感器、运动控制器等。这些设备将用于实现机器人的感知、决策和执行功能。
负责设计运动控制:通过合理的运动控制算法和机构设计,使机器人能够实现稳定、灵活和高效的六足运动。这通常涉及步态控制、坐标转换、轨迹规划等技术。
负责设计传感与感知:机器人需要具备多种传感器,以获取环境信息和自身状态。例如,可以使用接近传感器、惯性测量单元(IMU)、摄像头等传感器来感知周围的障碍物、地面条件等。
负责数据处理与决策:机器人需要进行数据处理和决策,以根据传感器数据进行地面分析、路径规划、障碍物避让等决策过程。这可能涉及使用机器学习和计算机视觉算法。
负责软件开发:通过编程实现机器人的控制逻辑、数据处理、通信和用户界面等功能。可以使用各种编程语言和开发框架来实现软件部分。
案例图片
相似案例推荐
其他人才的相似案例推荐
-

慧闪住
2019.02~至今 开发上线维护民宿/网约房登记管理系统
-

魅族-手机官网
功能介绍: 手机展示:以图文并茂的方式展示各种手机产品,包
-

星云社区
该产品是以校园物联网为核心业务,打造干净卫生、方便快捷、价格
-

格绿班
居民在投放可回收垃圾时将小程序生成的二维码给智能回收箱扫描,
-

格绿班
居民在投放可回收垃圾时将小程序生成的二维码给智能回收箱扫描,
-

河南生态环境卫星遥感监测系统
负责内容︰ 1、对项目的功能进行开发; 2、充分利用
-

乐摩吧小程序
由于 C 端系统老旧,已经难以满足公司当下的业务需求和未来发
-

燃客物联网平台
燃客物联网开放平台是公司面对物联网项目的一次整合,整合之前所
-

智能设备管理云平台
主要功能包括: 1. 投递柜、回收箱类设备的管理,设备是基
-

城市垃圾清运系统
主要功能: 1. 智能终端(Android)安装在垃圾收运
-

激光追踪系统
作为队长参加2023年电赛,主要负责代码编写和调试。2023
-

物联网系统设计
保证需求方对于物联网智慧化企业转型的原件系统需求以便企业管理
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

