
案例介绍
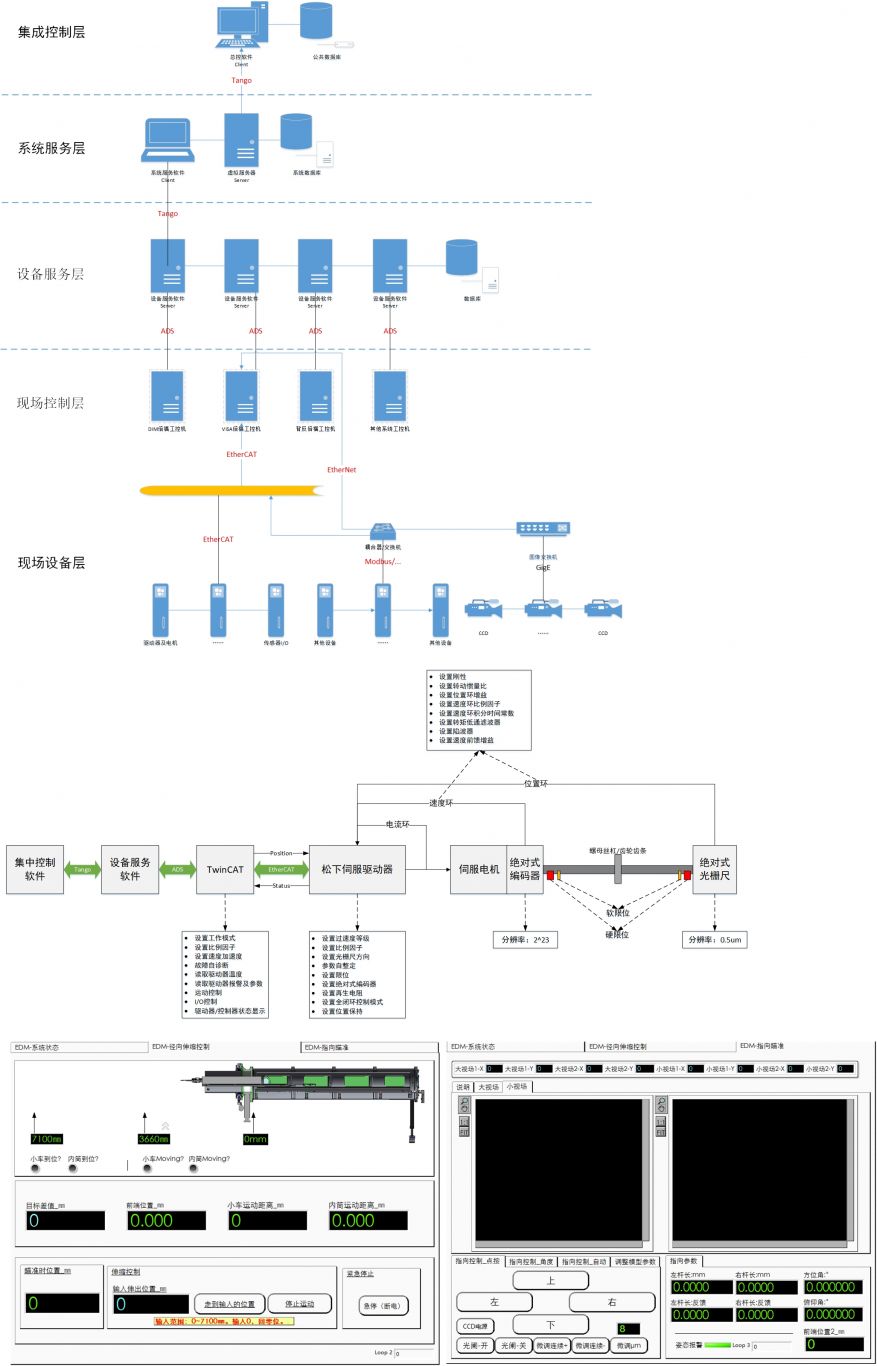
- 运用LabVIEW/QT/TwinCAT编写客户端/服务端软件,结合图像处理结果和光栅尺进行步进/伺服电机开闭环控制、I/O控制、参数设置、自动调焦;
- 相机SDK二次开发,利用NI Vision/TwinCAT Vision/Simulink 进行图像匹配、图像识别、清晰度判别;
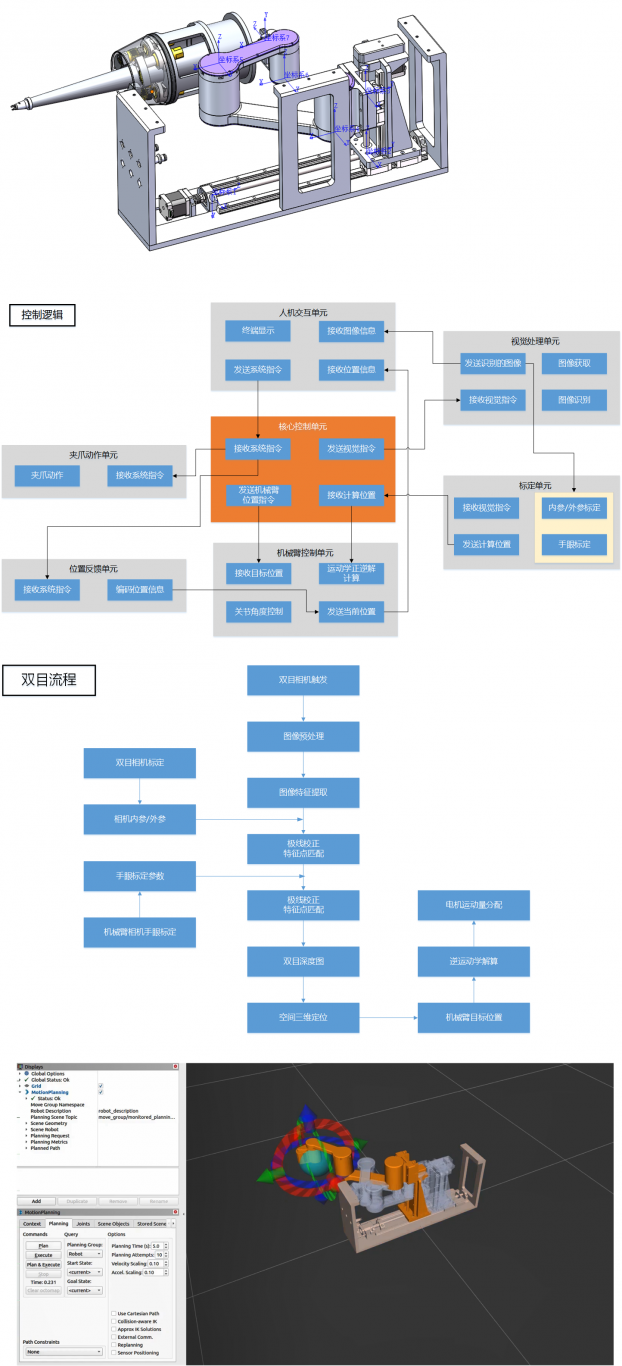
- 运用LabVIEW进行串联/并联机械臂的步进电机/电动缸/编码器/光栅尺的控制和采集;
- 运用Matlab/ROS2/MoveIT进行串联/并联机械臂的运动学正解/逆解、路径/轨迹插补、碰撞检测;
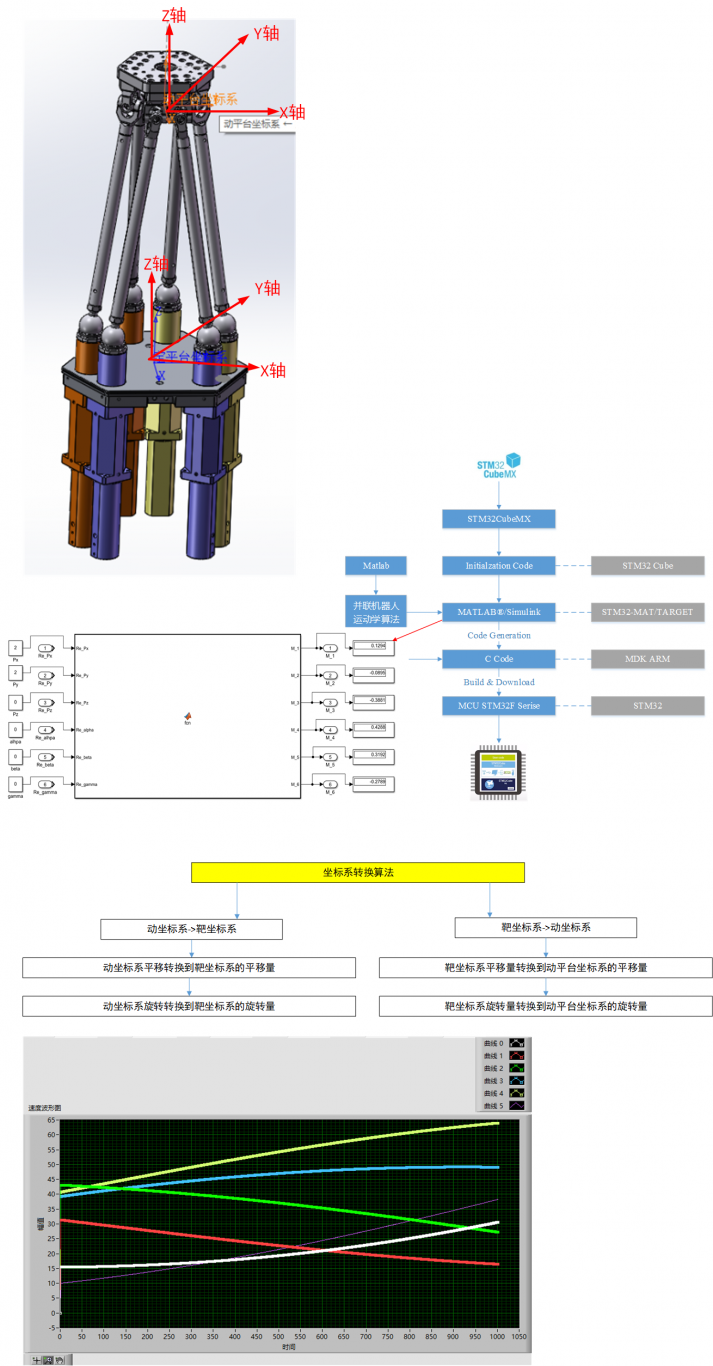
- 运用Matlab/Simulink、STM32进行运动学算法移植;
- 运用双目相机进行手眼标定、空间定位;
案例图片
相似案例推荐
其他人才的相似案例推荐
-

SRM系统
SRM系统是一个完善的供应商关系管理系统,在参与开发实施项目
-

标签管理系统
标签管理系统是一套基于烟草业务数据的数据分析系统。 其数据
-

品鸿珠宝
系统主要为品鸿供应链管理有限公司内部人员服务,包括货品管理、
-

贵客厅小程序
贵客厅小程序是一个通过用户填写资料,答题,参加品鉴会等方式来
-

EAM设备管理系统
负责甲方EAM设备管理系统,工作包含:需求调研、功能设计、功
-

住房租赁市场监测分析系统
1、后端使用springboot、mysql、redis、e
-

智能运维软件
建设自动化运维系统,实现运维操作自动化,提升运维效率,提高运
-

某工业吊机的滑模控制上的优化项目
在工业吊秤加载时,在不影响原有滑模控制的情况下,统一加载时序
-

某地监管管理系统
地市电梯监管系统,使用技术栈:spring cloud 3.
-

某地监管系统
地市设备追溯系统,使用技术栈:spring cloud 3.
-

简易监控平台
项目分为配置中心、服务端与客户端、web展示操作界面、数据存
-

pdf文字识别
脚本首先是利用python的开源图像处理库cv2将pdf转换
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

