
案例介绍
主要负责架空线路巡检机器人障碍物识别:通过构建障碍物数据集,训练目标检测网络,进行障碍物识别目标检测。另外其他多个项目如下:
电网带电接火作业机器人:主要通过图像识别导线目标、位姿计算,控制机械手进行导线抓取、剥皮、压接,双臂
协同,实现视觉引导机器手带电接火作业;
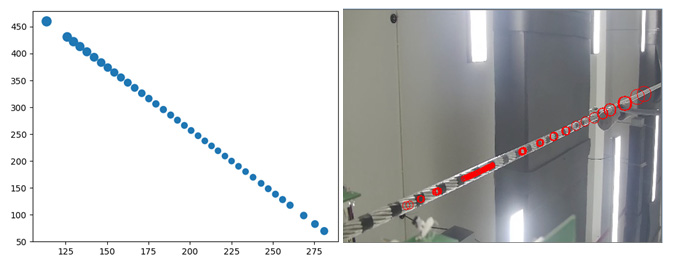
RTK全天候弧垂测量仪:主要通过使用RTK卫星定位数据,通过多项式拟合导线悬垂方程,进行弧垂测量;
自来水管道巡检机器人:负责水听信号分析,通过构建深度神经网络训练采集的漏水数据来实现漏水点测量;
智能表盘识别;
视觉引导机械手螺丝锁付;
架空线路巡检机器人视觉算法设计;
烟雾识别;
答题卡智能识别。
案例图片


相似案例推荐
其他人才的相似案例推荐
-

人工智能
AI 技术应用:我熟练运用了国外先进的 AI 技术,将其整合
-

明厨亮灶老鼠检测
需求:明厨亮灶中的子项目,基于门店监控摄像头图像,检测出老
-

动态障碍物4D标注系统
需求:离线处理车端回流数据,重建障碍物(truck/car
-

ai对话机器人
ai对话机器人,全栈开发,前端使用react,后端使用nod
-

PYTHON图片识别系统下面图片保密
通过PYTHON,设计图片识别系统,可识别图片中的汉字,字母
-

四向车嵌入式控制
设计linux嵌入式控制板,控制四向车基本动作母车行走、子车
-

智能驾驶中间件平台研发
C++,汽车领域,注重性能,通讯等等方面。对性能要求很高。截
-

智能问答行业问答机器人
我们可以利用本地AI大模型作为基础,开发出功能强大的问答机器
-

定位导航
定位导航运行图示,在室内,无gps的状态下,进行车体稳定运行
-

定位导航
采用单目摄像头进行室内定位,针对室内机器人,采用单目,进行定
-

赤兔后台
用于机器人配置平台,配置话术,语音等信息对接大模型具有语音人
-

AI中台
AI中台 V2.1 : 涉及技术: SpringClo
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

