四足机器人

案例介绍
本项目主要的功能包括手柄或键盘控制基于麦轮的小车的运动,KCF跟踪、导航、SLAM建图等功能,后续会接入麦克风阵列实现语音控制、接入IOT系统,
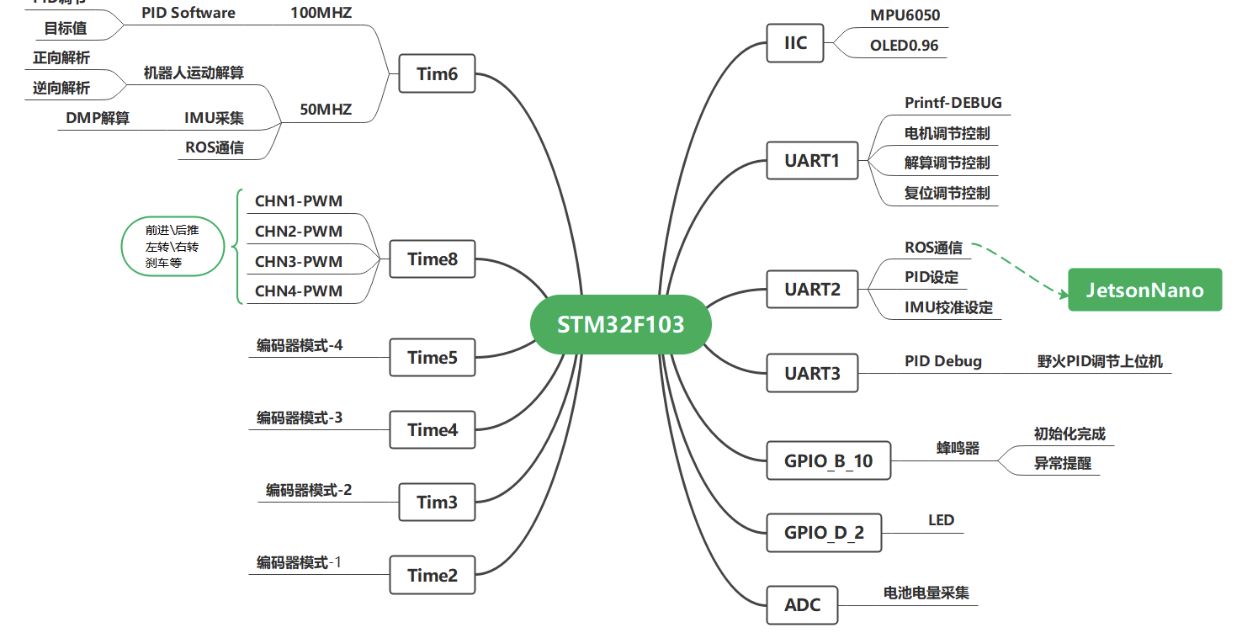
硬件分为两部分,基于STM32的控制层,也就是1.Hardware部分,该模块实现了电机的驱动和电池的测量等功能,同时板载了原子的MPU6050块、以及0.96LCD块。在ROS层使用的英伟达平台JetsonNANO,该平台可以任意替换能够运行ROS系统的设备。
两个平台通过串口115200特率进行通信,下载接口采用SWD方式
案例图片


相似案例推荐
其他人才的相似案例推荐
-

金泰石仪器
这是一个微信小程序,用于卖一些商品仪器。该微信小程序主要使用
-

机械臂智能夹取小木块demo
操作:机械臂与计算机相连, pc 程序通过计算机与机械臂串口
-

商业RPA自动化流程开发
1.自动读取表格数据。 2.自动打开网页、或者绑定已开的网页
-

RAP自动化流程开源软件支持国产系统环境
1.自动读取表格数据。 2.自动打开网页、或者绑定已开的网页
-

虚拟偶像机器人系统
虚拟偶像机器人系统 项目简介:设计一个知识渊博的虚设偶像男
-

AI外呼平台
AI外呼平台 使用机器人发起外呼 包含:ASR(语音识别
-

视觉缺陷检测
• I independently developed th
-

擎朗智能网站
官方首页,产品介绍,使用框架vue2,使用vuex管理,vu
-

工作流平台
1. 工作流平台 项⽬描述:基于机器⼈数据管理的研发平台
-

1. 工作流平台 、vimo智能标注平台
1. 工作流平台 项⽬描述:基于机器⼈数据管理的研发平台
-

血栓弹力图
全自动血栓弹力图仪 开发 内容:项目概况:arch l
-

金属3d打印实时仿真
该项目是一个金属3d打印的配套项目,主要管理和展示打印中的各
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服