
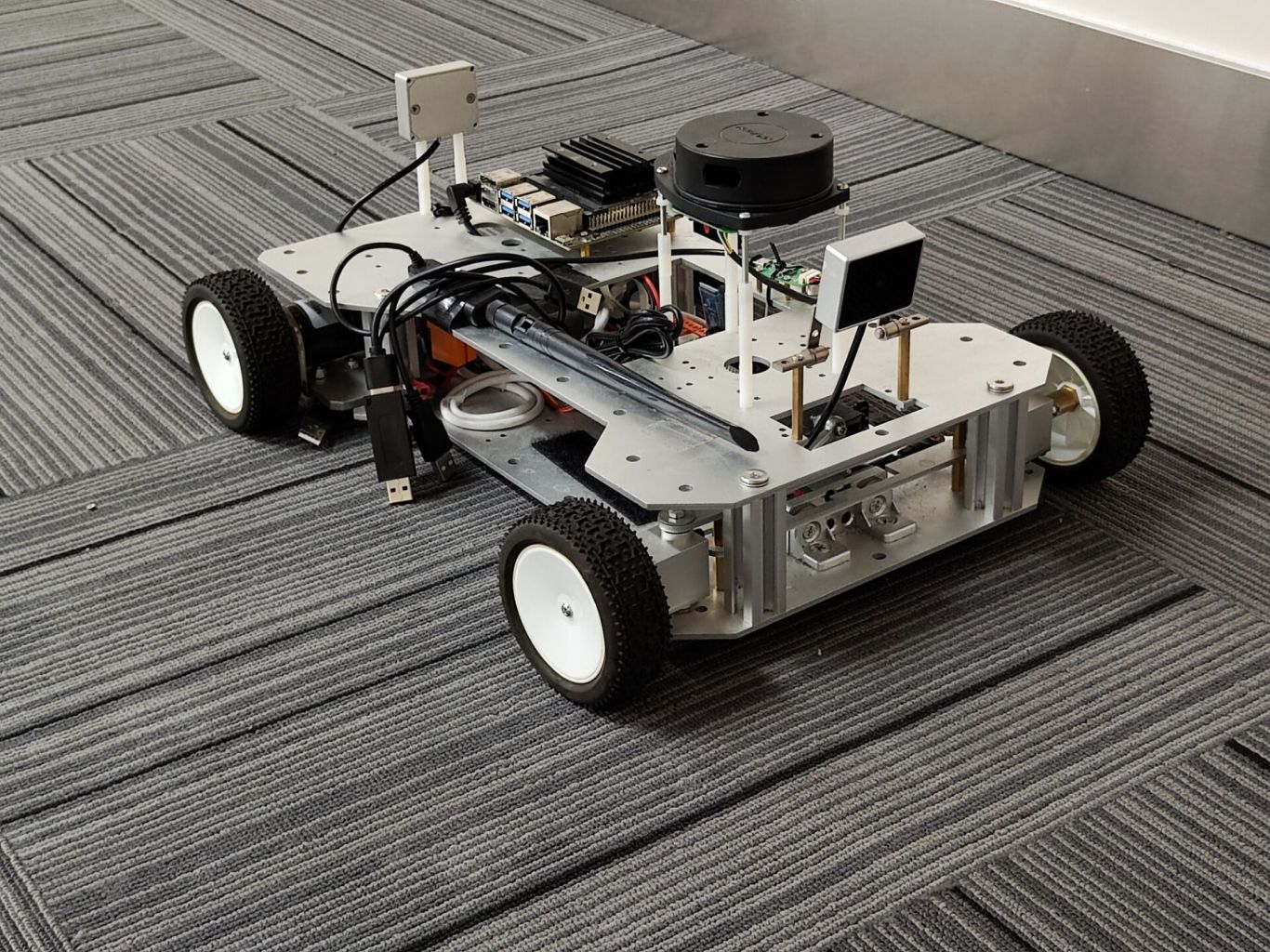
案例介绍
利用机器视觉巡线, 使用深度学习(YoloV5)进行目标检测,利用激光雷达进行避障与倒车与侧方位停车。项目中,优化图像处理算法以及路线检测算法,成功实现小车精准巡线;期间还修改YoloV5部署源码,成功完成目标检测模型与ROS环境和其它功能适配。
案例图片

相似案例推荐
其他人才的相似案例推荐
-

openfire 通讯开发
支持客户端 包括iOS、Android、Windows、Li
-

AI数字人
AI数字人 基于chatGPT与Metahuman进行
-

智能客服机器人
1、负责智能客服机器人 C 端会话及机器人运营后台产品的搭建
-

AOI设备检测系统
我是此项目负责人及软件架构师(电话:18550383708)
-

懒老板chatGPT智能客服系统
利用ChatGPT的技术,可以实现智能问答功能。用户可以向客
-

宏鲲玫瑰轮 水喷式埋设犁上位机软件
项目简介 同中船海工 9 水喷式埋设犁,Qt5、qmake
-

Android电视SN码烧录系统
功能实现包含原产线两站位相机拍照与PLC交互进行自动过站,多
-

压合机软件系统
作为项目经验,我完成了一个涉及研华运动制卡的压合机上位系統。
-

股票公告信息获取
(1)使用 Chrome 浏览器打开 https://www
-

智慧园区
可以打电话,微信详聊一下。作品具备的技术要点大概是vue2,
-

发票自动识别查验
通过对电子发票进行批量读取,识别其中的发票代码、发票号码、开
-

简历批量自动下载
启动RPA流程机器人,自定义输入并选择职位关键字、工作经验年
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服