
案例介绍
主要功能: 该界面主要实现四个功能:
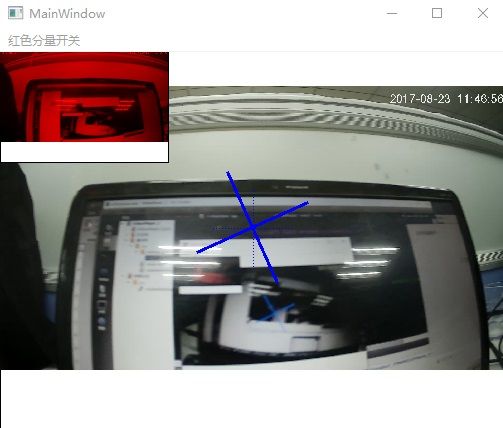
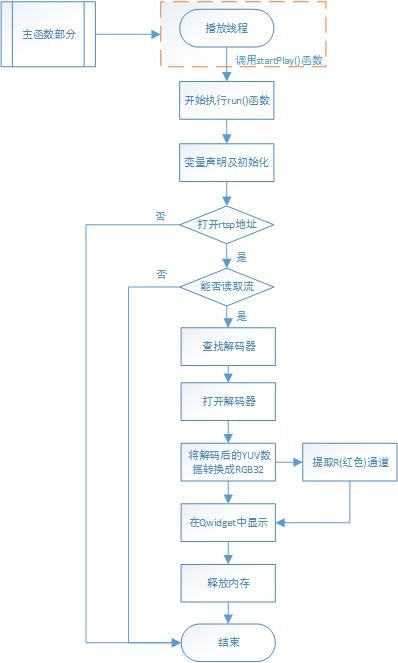
(1).读取摄像头视频流(rtsp),并实时显示到主界面上;
(2).将rtsp视频流经过FFmpeg解码后的YUV数据转化成RGB32数据,提取其中的R(红色)通道,并在界面中的小窗显示(如图2中的左上角部分);
(3).将水下机器人的横滚角反映在界面上(如图2中,中间部分的虚线“十字”为水平和竖直参考位置;实线“十字”为横滚运动后机器人相对参考位置的角度变化,图示为模拟横滚角为10度的情形)。
(4).若程序掉电,再次上电后能够自动地建立连接。
案例图片
相似案例推荐
其他人才的相似案例推荐
-

月宇宙
月宇宙是一个短视频APP浏览平台, 用户可以发布自己的短视频
-

直播平台
足球,篮球等体育比赛直播平台,后台配置比赛信息,配置广告内容
-

兰雄直播
项目名称:兰雄直播(Objective-C) 项目描述:一
-

小明影院
项目描述:利用手机小程序来观影最新的,最热门的电影、电视剧,
-

B站视频的爬取
b站的视频是以音频和视频分开存储的,通过抓包,找到音视频对应
-

test
蚂蚁集团研发的mPaaS [2] ,融合了支付宝科技能力,可
-

视频分享网站
我使用React、Express和Bootstrap开发了一
-

万达电影
万达电影APP是万达影城官方购票软件,覆盖全国万达影城的影片
-

GOT_引出异鬼
使用UE5制作 负责完成视频中蓝图逻辑部分,包括怪物生成,
-

雪球体育
这是向用户展示足篮赛事,吧主直播互动的一款体育类app,包含
-

互联网视频点播系统
互联网电商视频点播系统后台管理和终端显示界面案例。 我的职
-

SSV3D
SSV3D中性播放,只要是播放SBS格式的内容,呈现逼真的3
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服