
案例介绍
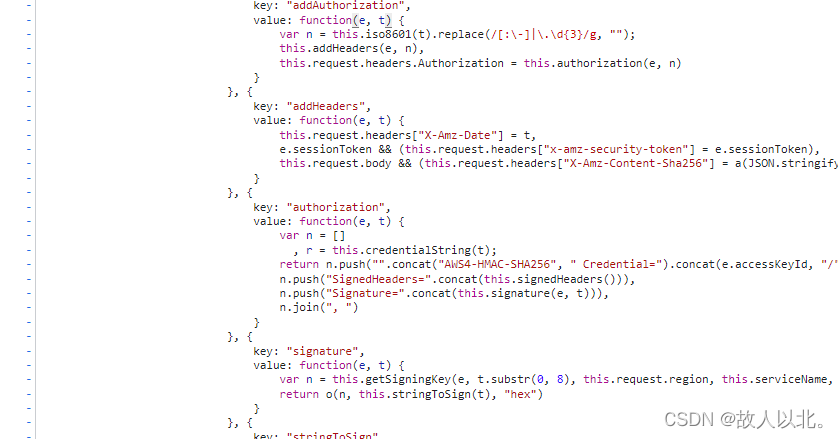
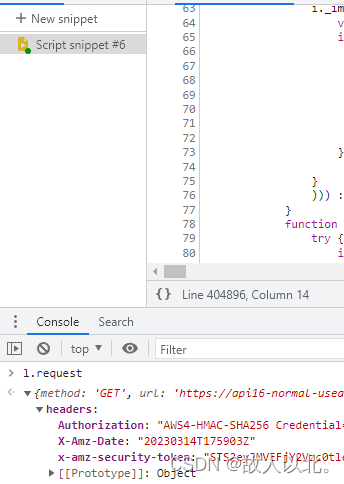
上传视频需要在请求头了吗添加一个Authorization的参数,这个参数在js文件里面进行加密生成的。
案例图片
相似案例推荐
其他人才的相似案例推荐
-

运动控制算法直线与直线过渡
如图所示为运动控制器算法的MoveL与MoveL指令过渡算法
-

基于激光雷达的喷涂滚涂项目
采用8阶多项式拟合算法,将激光雷达数据进行拟合,并生成机器人
-

运动控制算法圆弧与直线过渡
运动控制算法圆弧与直线过渡,即机器人示教器指令的MoveC与
-

运动控制算法圆弧与圆弧过渡
机械臂控制器算法:MoveC-MoveC的圆滑过渡算法,以及
-

符合鱼眼图像畸变模式的嵌入模块
鱼眼相机在拥有大视场的情况下会出现图像失真。而这一事实导致了
-

golang、python客户端开发
爬虫为漏洞扫描类爬虫,可以获取网站指纹及部分漏洞识别 支持
-

Gpt-Ai
GPT-Ai 技术栈:SpringBoot , Myb
-

全面监控机器人移动监测项目
之前的项目都在移动硬盘中,该项目涉及国网,恐涉密不适宜展示,
-

某机器人软件
用于中小学生竞赛的教育机器人的控制软件;可在软件中控制个机械
-

巡检机器人系统web端
本人负责 巡检机器人系统 前端采用 vue3全家桶,pini
-

AI人工智能研究活动视觉推广设计
随着人工智能在研究上的不断精进,AI已经渗透到人们生活中的方
-

chatGPT web
技术栈:vue3、naiveUI、pinia 项目介绍:根
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服