
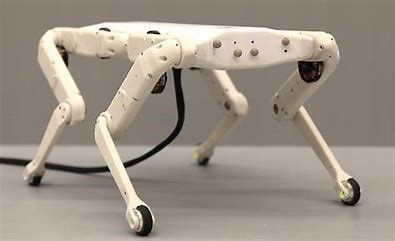
案例介绍
所有运动学和动力学算法都运行在机载电脑中: 12个STM32作为电机控制器 只运行FOC算法并用CAN总线与SPIne通信, SPIne上有两个STM32负责打包CAN消息并用SPI发给机载电脑
SPIne之所以用两个STM32是因为带宽不够, 每个STM32有两路CAN总线, 每一路负责三个电机(一条腿)的通讯才能达到1000Hz, 若一路负责六个电机控制频率只能降到约600Hz
在盲爬楼梯时[4], MPC的动力学模型的线性化依旧取 , 控制效果还是挺不错的
案例图片

相似案例推荐
其他人才的相似案例推荐
-

扫描仪表格提取
对扫描仪结果,进行表格自动提取,按从上至下、从左至右输出每个
-

X光影像垃圾回收
对垃圾中的**子类,使用X光感相机拍摄,识别标的物 基类模
-

扫描仪实体识别和关系提取
对扫描仪的扫描结果进行文字识别,并将ocr的输出结果进行实体
-

宠物胸背小程序
该产品是给宠物使用的一款胸背。小程序通过蓝牙控制硬件设备,用
-

步态识别智能巡航小车
基于树莓派,将步态识别算法与Raspblock AI全向智能
-

小渡报数
1.绑定智能计算设备(设备是蓝牙协议链接小程序) 2.用户
-

6666666666666666
顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶
-

wordpress建站
顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶
-

煤自燃无线监测智能化预警专家系统
矿井火灾指标在线监测硬件为集传感器、无线感知网络、485通信
-

温度控制系统
1.主控芯片通过温度传感器获得温度数据。 2.主控芯片通过
-

基于BLE蓝牙RSSI指纹的室内定位算法
该项目为通用汽车的无钥匙进入和启动系统的算法研究和实现,当用
-

Niuess
NIUESS App是智能硬件管理平台,可以随时随地发现、连
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服