
案例介绍
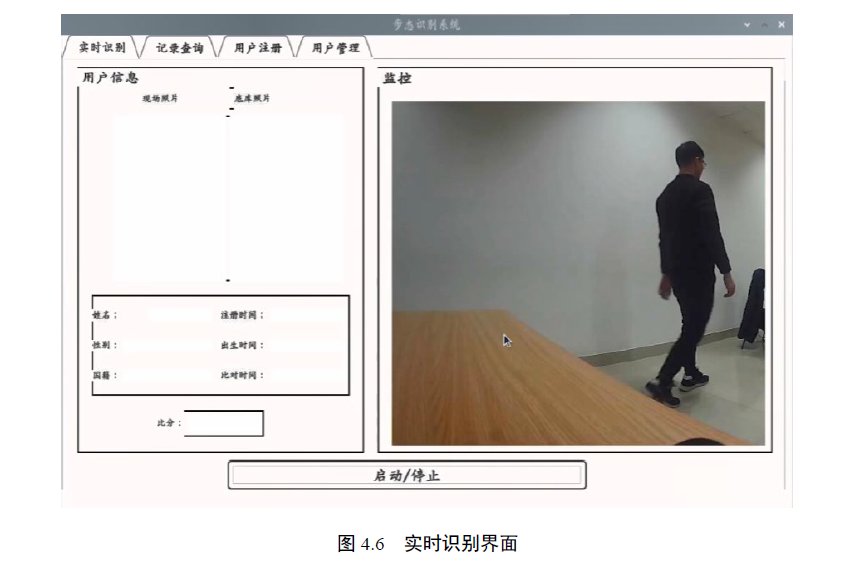
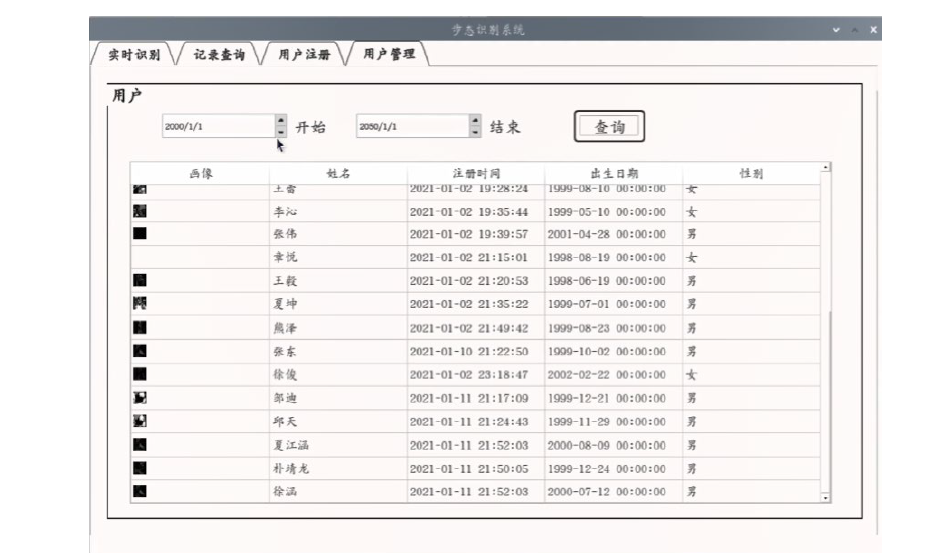
基于树莓派,将步态识别算法与Raspblock AI全向智能车有机结合,集成电机模块、舵机模块、视觉模块、语音模块等多个模块,实现步态识别智能巡航小车。整个装置集步态注册和实时步态识别、自动巡航和人工操控为一体,配有前端可视化操作界面,操作流程人性化,为实时流动步态识别的推广贡献了一份力量。
各模块的主要功能如下:
- 电机模块:驱动智能车的麦克纳姆轮,实现全向运动。
- 舵机模块:通过可视化界面控制舵机,实现摄像头云台及镜头的旋转;
- 视觉模块:通过树莓派USB高清摄像头采集步态序列并上传;
- 语音模块:实时播报步态信息注册进度和步态识别结果等信息;
- 深度学习模块:采用最先进的步态识别相关算法,提供快速准确的识别服务。
案例图片


相似案例推荐
其他人才的相似案例推荐
-

小渡报数
1.绑定智能计算设备(设备是蓝牙协议链接小程序) 2.用户
-

立即定位
立即定位是一款专业的GPS车载监控管理软件,包含PC端与AP
-

国产化存取款一体机应用系统开发
1、本项目功能:有卡存款、有卡取款、转账、查询、无卡存款、*
-

智能外币配钞设备及系统
1、项目组成分为系统后台、前端页面、打印封包机设备控制、现金
-

体征监测毫米波雷达24G
基于国产24G芯片与国产MCU,开发呼吸心率雷达,通过毫米波
-

生产辅助测试套装
电路板为基于STM32的测试板,可接蓝牙板进行通信,同时包含
-

宠物胸背小程序
该产品是给宠物使用的一款胸背。小程序通过蓝牙控制硬件设备,用
-

扫描仪实体识别和关系提取
对扫描仪的扫描结果进行文字识别,并将ocr的输出结果进行实体
-

X光影像垃圾回收
对垃圾中的**子类,使用X光感相机拍摄,识别标的物 基类模
-

扫描仪表格提取
对扫描仪结果,进行表格自动提取,按从上至下、从左至右输出每个
-

四足机器狗
所有运动学和动力学算法都运行在机载电脑中: 12个STM32
-

6666666666666666
顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶顶
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

