
案例介绍
在船舶、列车和工程机械等大型装备的制造过程中涉及大量的复杂构件焊接。复杂构件上焊缝数量众多、类型多样、空间异位、长度跨度大,且角焊缝是其主要的焊缝类型之一。
为此,针对狭窄空间角焊缝端点寻位难,焊缝局部凸起和变拼装间隙干扰严重等问题,本项目基于机器视觉,实现复杂构件空间角焊缝的高质高效焊接。
线激光视觉传感器对激光线上任何一点的3D坐标进行测量,精度小于等于0.1mm,该传感器除了用于焊缝识别,还可以用于表面轮廓检测、缺陷检测、尺寸测量等。
线激光视觉跟踪传感器安装在机器人法兰盘上,工控机自动处理强噪声焊接图像,自动规划焊接路径,跟踪精度小于等于0.3mm,有效避免热变形造成的焊接误差;设备成本低,算法具备竞争力。
在产线上,粗略放置任意空间形态的焊件,机器人自动识别与跟踪焊缝,自动化完成焊接,高精度高稳定性,取代人工,有效提高焊接效率。
可实现角焊缝、对接焊缝、曲缝等焊缝的识别,未来扩展到更多形态的焊缝。
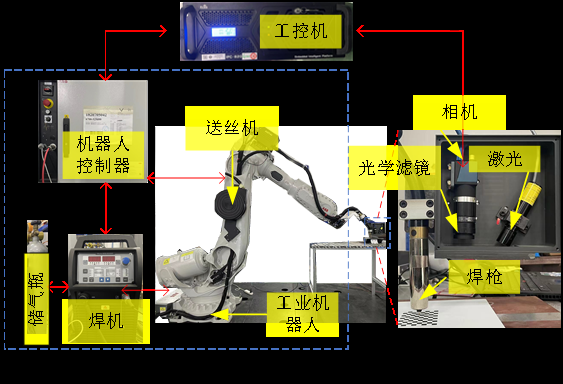
案例图片



相似案例推荐
其他人才的相似案例推荐
-

优化
业务在运行中有部分客户反映是有卡顿现象,我们介入后查看有部分
-

优化
客户使用我们的只能语音产品的某一个功能后出现了502的现象,
-
")
机器人控制程序2(带ui)
机器人模型上位机,开发环境为微信小程序,包括低功耗蓝牙设备的
-
")
机器人控制程序(带ui)
包括rviz配置也都做好了但是,有些东西涉密不方便发布,包括
-

机器人聊天框
负责整体开发,通过js+jq+ajax实现,该机器人可集成到
-

亿隆购物
随着行业竞争程度的不断加剧,服务已成为电商行业主导竞争格局的
-

智能聊天机器人
实现功能:在APP中实现了添加好友,通过Netty通信技术实
-

对话机器人
发企业智能机器人,采用对话系统+推荐方式,结合语义分析,对话
-

喷砂机
是采用6轴ABB机器人给用户的产品进行喷砂,使其产品变得更光
-

烧录机
该机器用于芯片烧录 通过固定位置取料,再到固定位置放料
-

数字人,后台
基于threejs开发的3d虚拟人导航机器人, 数据后台配
-

IDoo
IDoo是一款跨平台的执行控制程序,他兼容了各种驱动器驱动,
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

