
案例介绍
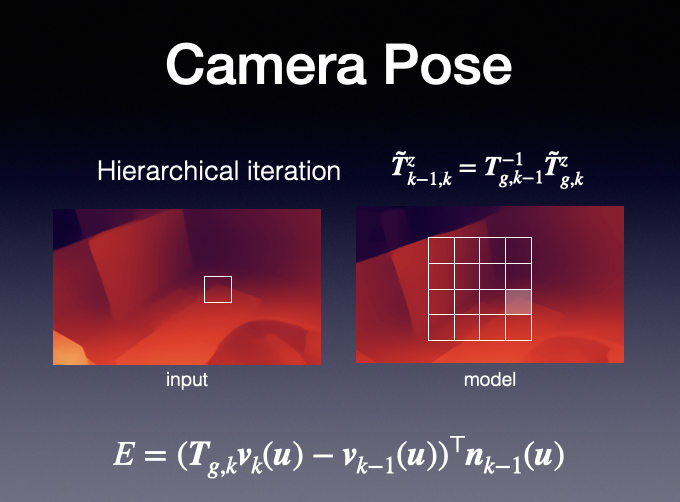
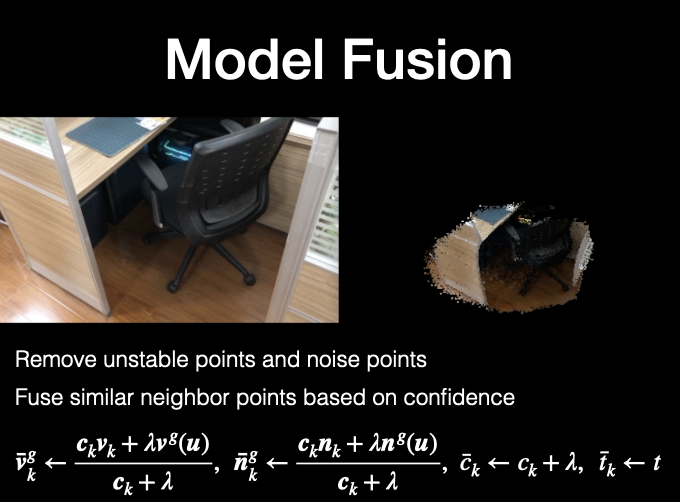
本文提出了基于单目RGB图像序列的重建算法,实现了一个从二维图像转化到三维模型的系统,并在实验中对比分析了使用不同深度估计网络和重建方法的效果差异。与现有以深度图作为输入重建算法不同,本算法仅以彩色图像作为输入,不需要任何先验模版和相机参数信息,输出基于点的三维面片模型。算法分为两个部分:第一个部分使用神经网络从单幅图像中估计出稠密的伪深度,然后基于多幅图像之间的几何一致性对深度图像序列进行校正;第二个部分首先基于几何上一致的深度图,使用点到面最优的迭代算法估计相机位姿,然后投影细节更丰富的未校正图像至全局空间,基于点的可见置信度融合面片模型。实验结果表明,本文提出的使用两种深度进行联合重建的方法在静态场景上是可行的,与单一深度输入的重建算法相比,可以获得更高的鲁棒性以及更多的细节。
案例图片
相似案例推荐
其他人才的相似案例推荐
-

智慧工地
智慧工地管理平台依托互联网技术,能够实现用户管理,劳务信息,
-

某平台爬虫
开发整套蜘蛛捕获,可以获取名称,价格,销量等多种内容,含有下
-

app和redis爬虫
分布式爬虫 使用crawl类爬虫实现,正则匹配爬取 re
-

智慧工地
安全生产一直以来都是工业生产和建设中永恒不变的主题。根据大量
-

中药识别
传统的中药饮片在实际应用时,对其快速识别大多依靠具有中药相关
-

远程温湿度记录仪
完成现场温湿度读取,并通过无线传输到主机上,主机能自动记录数
-

爬取微信公众号
这个爬虫可以满足微信公众号所有数据的抓取,例如,标题、内容,
-

工商信息的采集
主要针对钉钉和企查查抓取,绕过vip验证,绕过ip检测账号检
-

爬虫数据
爬取各类网站的数据,然后对数据的清洗,再然后就行入库处理。然
-

lazada,amazon,数据的爬取
对京东,亚马逊,shopee,lazada电商网站数据进行爬
-

多通道信号处理
采用软件无线电技术,首先对信号数字化,然后对信号进行检测,采
-

信号解调
采用软件无线电思想,利用多种数字信号处理算法,将FM和AM模
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

