
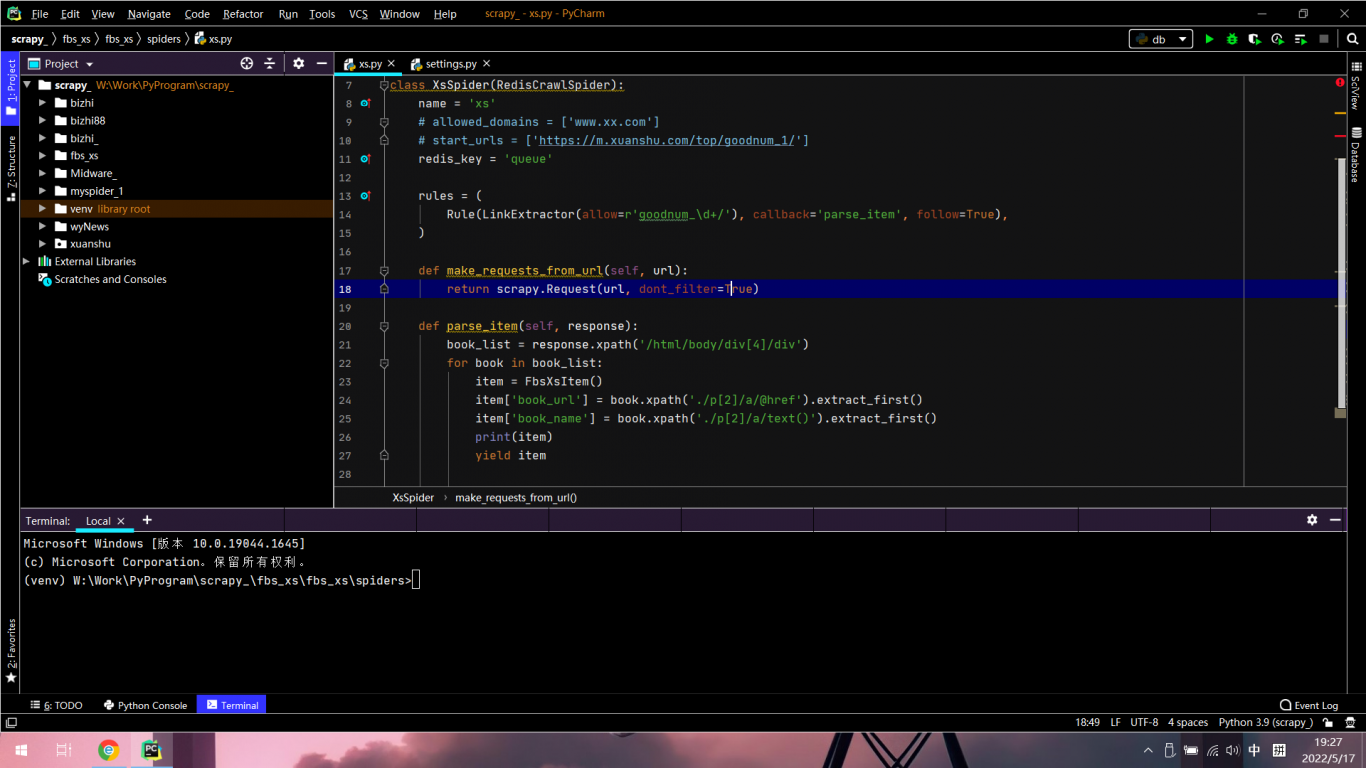
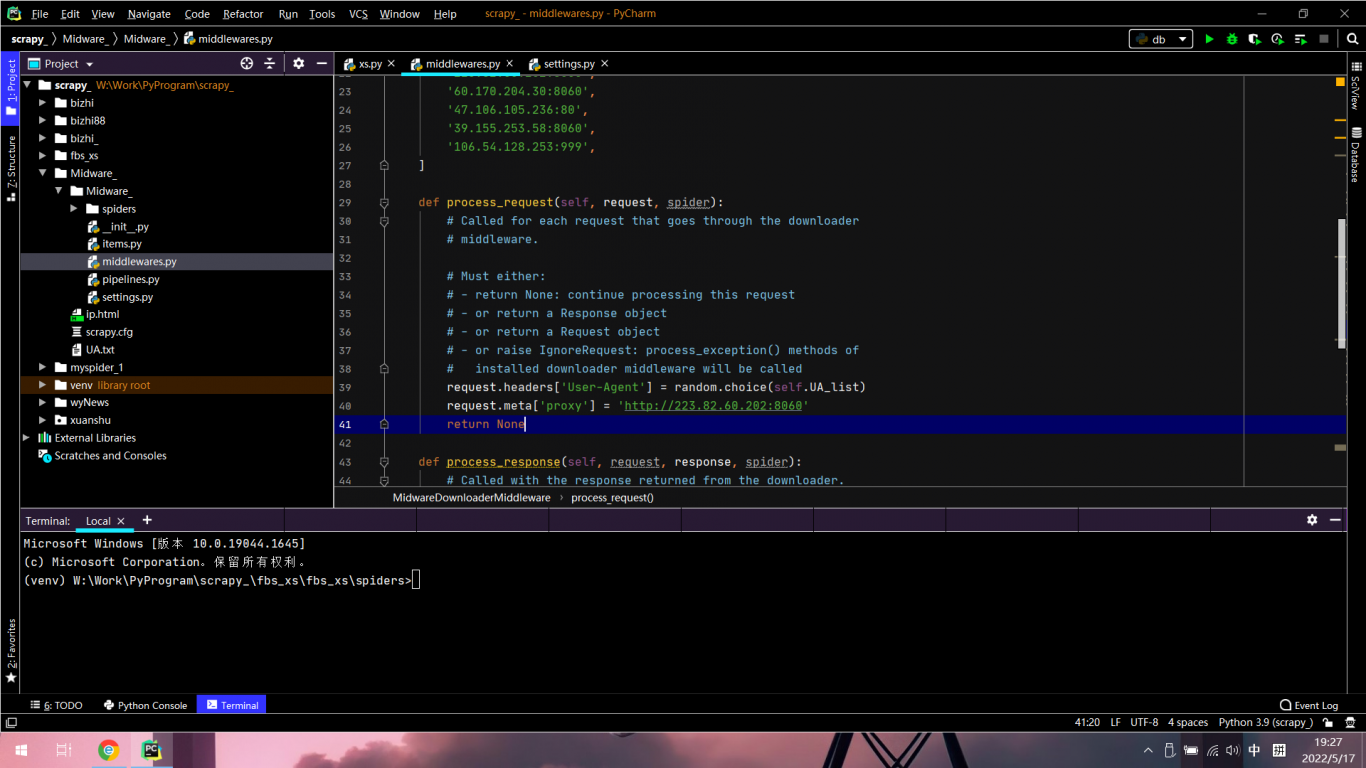
案例介绍
爬取图片,视频,小说等网站, 熟练使用selenium,进行动态化加载, 使用scrapy框架,简单爬取各大网站
案例图片
相似案例推荐
其他人才的相似案例推荐
-

自动消杀机器人
机器人通过使用深度学习视觉算法 slam 建图实现自主路径规
-

自动消杀机器人
机器人通过使用深度学习视觉算法 slam 建图实现自主路径规
-

超高精度磁通测量设备自动化控制软件
测量磁铁表面的高斯强度值,其由于生产工艺不同测量工艺方案也不
-

水下机器人控制器
水下机器人控制器软硬件开发,主要功能有舵机、电机控制,TF卡
-

图像分割
熟悉各种AI图像分割方案。可实现。 如fastrcnn、m
-

图像检测
对各种图像进行AI对象检测。 对AI模型进行各种优化加速。
-

公司官网
通过官网可对公司产品和基本信息基本了解,可实现公司与客服了解
-

MOIN 口袋云台相机
上层搭载单臂三轴小型云台系统,摄像头,云台控制以及电机驱动和
-

视觉检测软件
该软件为一款用于工业生产的通用尺寸测量软件,可在设置界面定制
-

并联蜘蛛手视觉引导抓取定位
识别定位徽章坐标,并且按照徽章等级进行分类。根据徽章图案所示
-

并联蜘蛛手视觉引导抓取定位
识别定位徽章坐标,并且按照徽章等级进行分类。根据徽章图案所示
-

银行钱捆定位项目
深度相机带彩色相机获取图像数据,对箱子里的钱捆进行3D+2D
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服