自动消杀机器人

案例介绍
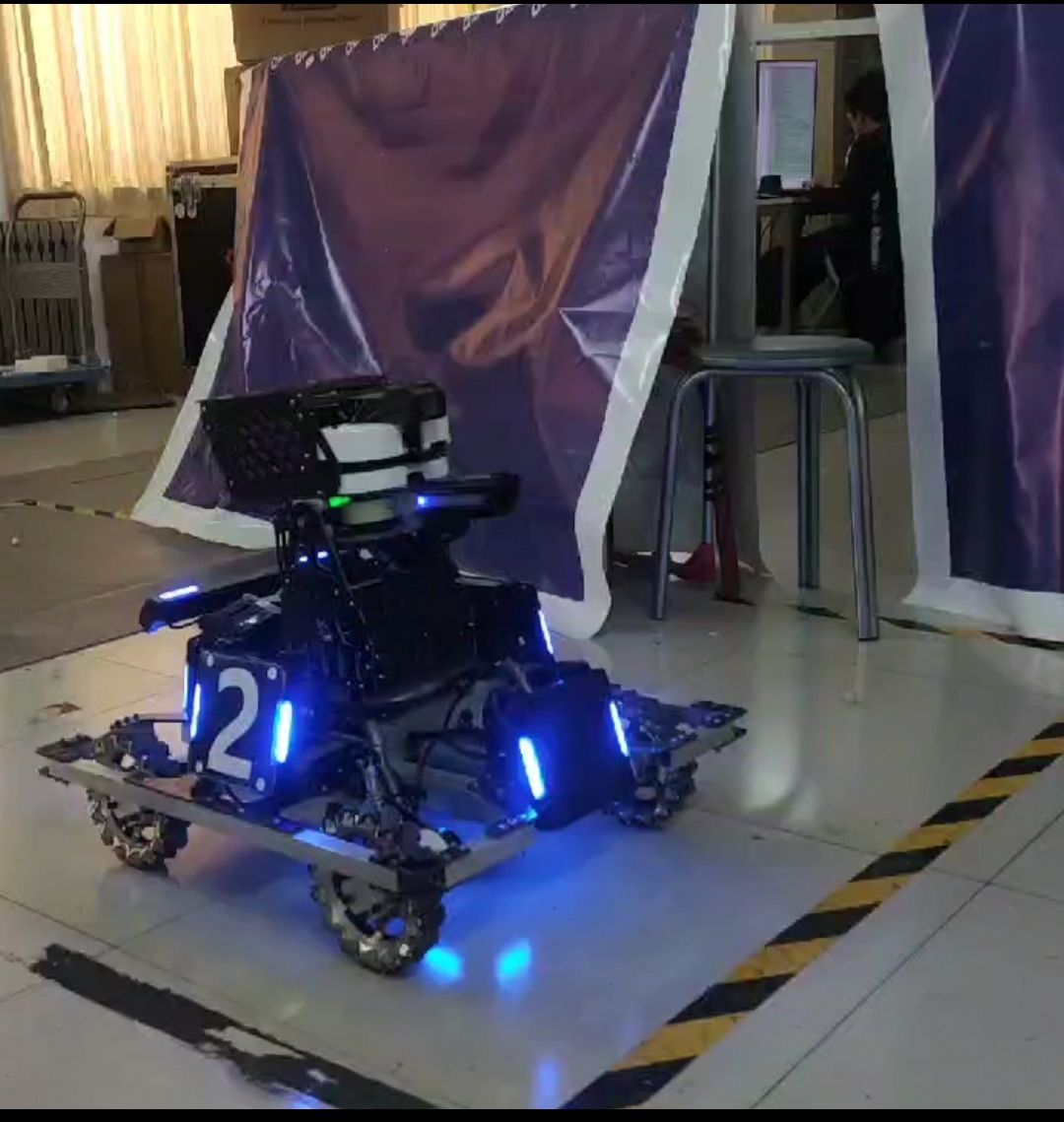
机器人通过使用深度学习视觉算法 slam 建图实现自主路径规划,使其能够按照现实情况
进行路径自主规划,提高效率;使用 TOF 深度相机与超声波和红外相结合的方案,避免在巡逻过程中与障碍物相撞,实现自主避障;将消杀喷头安装在机器人的二自由度云台上,同时相机也随云台运动,实现360°全方位覆盖喷洒,避免了机械式摆动云台喷洒带来的误差。将普通的舵轮底盘加装悬挂系统,减少外界的震动或冲击对设备、控制元件等的影响,从而起到减震缓冲的作用。
主要负责:相机采集信息的处理,运动控制算法的设计与仿真,模块底层驱动的搭建
案例图片

相似案例推荐
其他人才的相似案例推荐
-

超高精度磁通测量设备自动化控制软件
测量磁铁表面的高斯强度值,其由于生产工艺不同测量工艺方案也不
-

水下机器人控制器
水下机器人控制器软硬件开发,主要功能有舵机、电机控制,TF卡
-

图像分割
熟悉各种AI图像分割方案。可实现。 如fastrcnn、m
-

图像检测
对各种图像进行AI对象检测。 对AI模型进行各种优化加速。
-

智能仓储立体仓库系统
1 主要负责系统架构梳理及调整,优化系统,保证系统运行稳定
-

园区清扫车项目
完成自动驾驶规划控制模块的设计及实现(实现方式主要为 PID
-

小说网站爬虫
爬取图片,视频,小说等网站, 熟练使用selenium,进行
-

小说网站爬虫
熟悉爬取各大小说,图片, 视频网站, 能绕过各种反爬机制,
-

公司官网
通过官网可对公司产品和基本信息基本了解,可实现公司与客服了解
-

MOIN 口袋云台相机
上层搭载单臂三轴小型云台系统,摄像头,云台控制以及电机驱动和
-

视觉检测软件
该软件为一款用于工业生产的通用尺寸测量软件,可在设置界面定制
-

并联蜘蛛手视觉引导抓取定位
识别定位徽章坐标,并且按照徽章等级进行分类。根据徽章图案所示
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服