
案例介绍
基于果园航拍图像的语义分割和路径规划算法 2020年4月 - 2020年12月
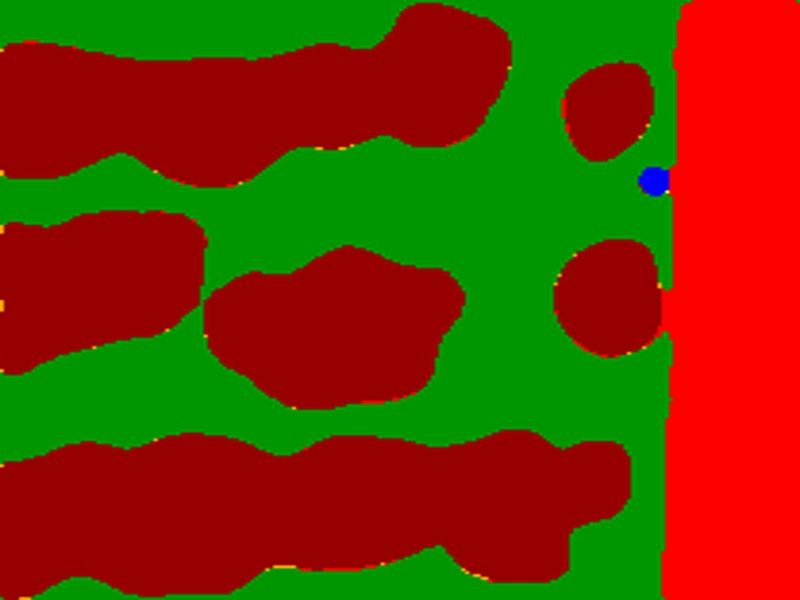
研究目的:在果园中,基于无人小车的地面环境探测方法只能对周围一定区域进行探测。受限于探测范围,路径规划也只能在一个局部区域中进行,很难对规模化果园进行整体的路径规划。为了提高果园路径规划效率,我们提出了一种基于无人机的,通过语义分割的方式,一次性探测整个果园区域的路径规划方法。
项目思路:为了使语义分割算法更加试用于果园,我构造一个命名为SADNet的语义分割网络,分割提取果园中的道路和果园。该网络包含了encoder-decoder结构、ASPP模块、SCSE注意力机制模块和改进的卷积层结构DIC模块。利用分割后的结果,将整个果园抽象化为二位栅格结构网络模型。使用基于A*的路径规划方法,最终规划出整个果园的路径,准确率达到93.61%,优于同一数据集下的DeepLabv3、PSPnet等网络。果园的路径规划线路实现了对所有果树的遍历,对比人工规划路线只有2.9%的误差。
案例图片


相似案例推荐
其他人才的相似案例推荐
-

用户消费行为数据分析
数据挖掘分析,爬虫,爬取数据,筛选数据,存储数据,分析数据,
-

公司产品
公司产品,不方便展示。此处上传为做的几个效果图。分别展示地图
-

调整图片大小为指定分辨率
将需要修改的图片放在文件夹中,读取该文件夹的所有图片,指定分
-

爬取豆瓣电影信息
多线程操作,获取豆瓣电影频道下所有电影信息,保存在txt中,
-

采集各大影视平台弹幕评论
使用多线程分布式采集 大大提高采集效率 对其进行分析 得到观
-

采集网易云音乐
采集网易云音乐 提高人工下载效率 轻松获得大量数据 采集抖
-

网页端表情识别
可以记录观看视频时候的每秒钟的表情,生成图表,帮助用户回忆,
-

安防
此为信令交互部分,完成与视频设备对接,由于各厂商对协议得理解
-

安防
其他得不方便展示。可以通过手机、微信、邮箱等联系方式。主要完
-

房价预测
预测20 世纪70 年代中期波士顿郊区房屋价格的中位数,已知
-

无人值守地磅称重
无人值守地磅称重:负责整个系统的全部功能开发,主要是实现地磅
-

车辆调度平台
主要负责整个平台的后端接口开发,使用了xcode后端框架、负
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

