
案例介绍
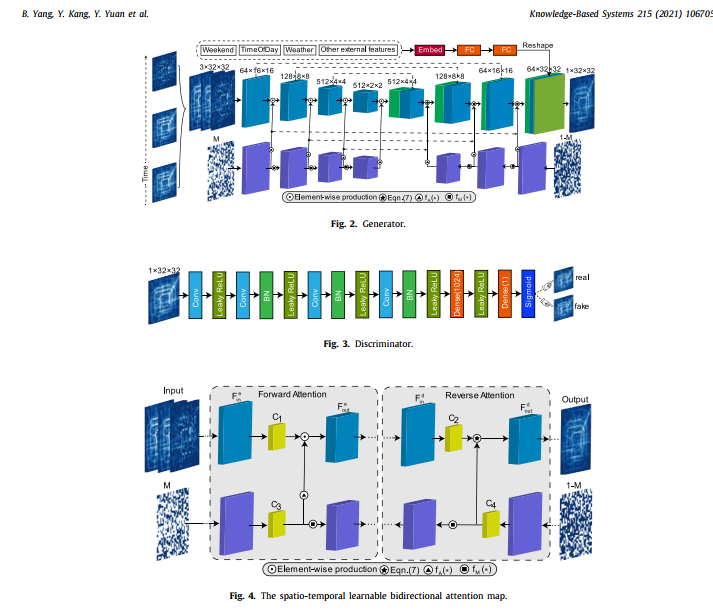
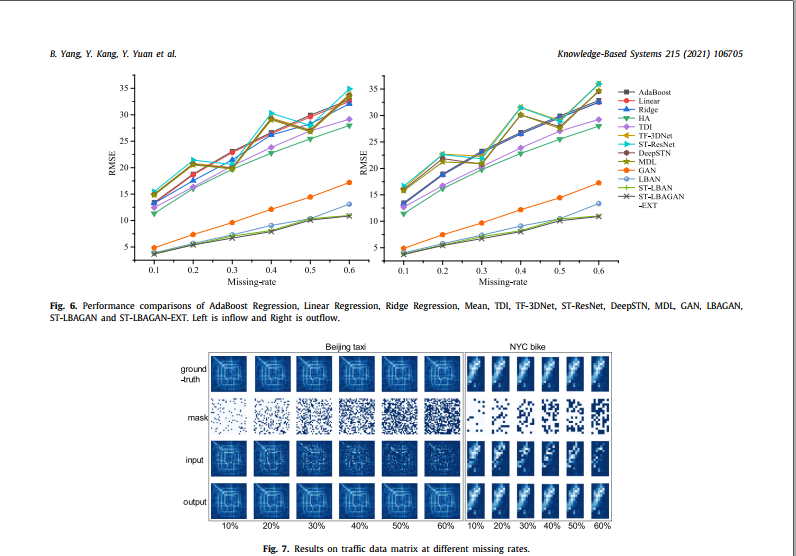
实时、准确、全面的交通流数据是智能交通系统为城市交通提供高效服务的关键。在采集数据的过程中,造成数据丢失的因素很多,需要对这些因素进行补充和修复,以减少不稳定性,提高系统在智能交通系统中应用的精度。提出了一种基于时空可学习的双向注意生成对抗网络(ST-LBAGAN)的交通数据缺失归因算法。首先,我们将外部因素、历史观测数据、不完整数据和掩蔽图像作为生成器的输入,并使用二值分类作为鉴别器的输出来获得缺失数据的imputation。其次,在U-Net的基础上构建了发生器的编译码器。可学习双向注意的正向注意图和反向注意图分别对应于编码器和解码器,有效地获取交通流的时空随机特征。第三,在编码器和解码器中,高级和低级特征由多个跳过连接组合。此外,结合掩蔽重构损失、感知损失、区别性损失和对抗性损失优化新的目标函数,以提高数据归并能力。最后,我们的模型在北京出租车GPS数据集上得到了很好的适应性。实验结果表明,在不同的标准基准上,提高了最先进的性能。
案例图片
相似案例推荐
其他人才的相似案例推荐
-

绝缘检测板
绝缘检测单板主要实现的功能是对电机绝缘电阻进行检测,检测方法
-

基于全志T7芯片上开发360环视
实现对360环视系统的搭建,完成各种驱动的开发,如LCD,i
-

金智通
金智通工地管理平台采用互联网+硬件设备方便、快捷、高效、安全
-

低压非居民合同数据获取
此项目为国家电网内网项目,客户需要进入营销系统获取未生成合同
-

低压非居民合同数据获取
此项目为国家电网内网项目,客户需要进入营销系统获取未生成合同
-

化学气体传感器漂移补偿策略
空气质量或气体传感器由于其高灵敏度和低成本而广泛应用于电子鼻
-

激光辅助打靶系统
此系统通过控制模拟激光枪发射激光,进行打靶,靶机通过采集图像
-

识别系统
心电、心冲击等生理信号与深度LSTM网络结合的个体识别与身份
-

追溯控制系统
生产追溯系统是一套自动化流水线系统,展示层使用Winform
-

阻抗测试系统
该项目的主要实现目标是实现橡胶物质的合格性测试。要求搭建安全
-

python爬虫
python爬虫 python爬虫 python爬虫 pyt
-

google翻译
github 200+星项目 A free and un
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

