
案例介绍
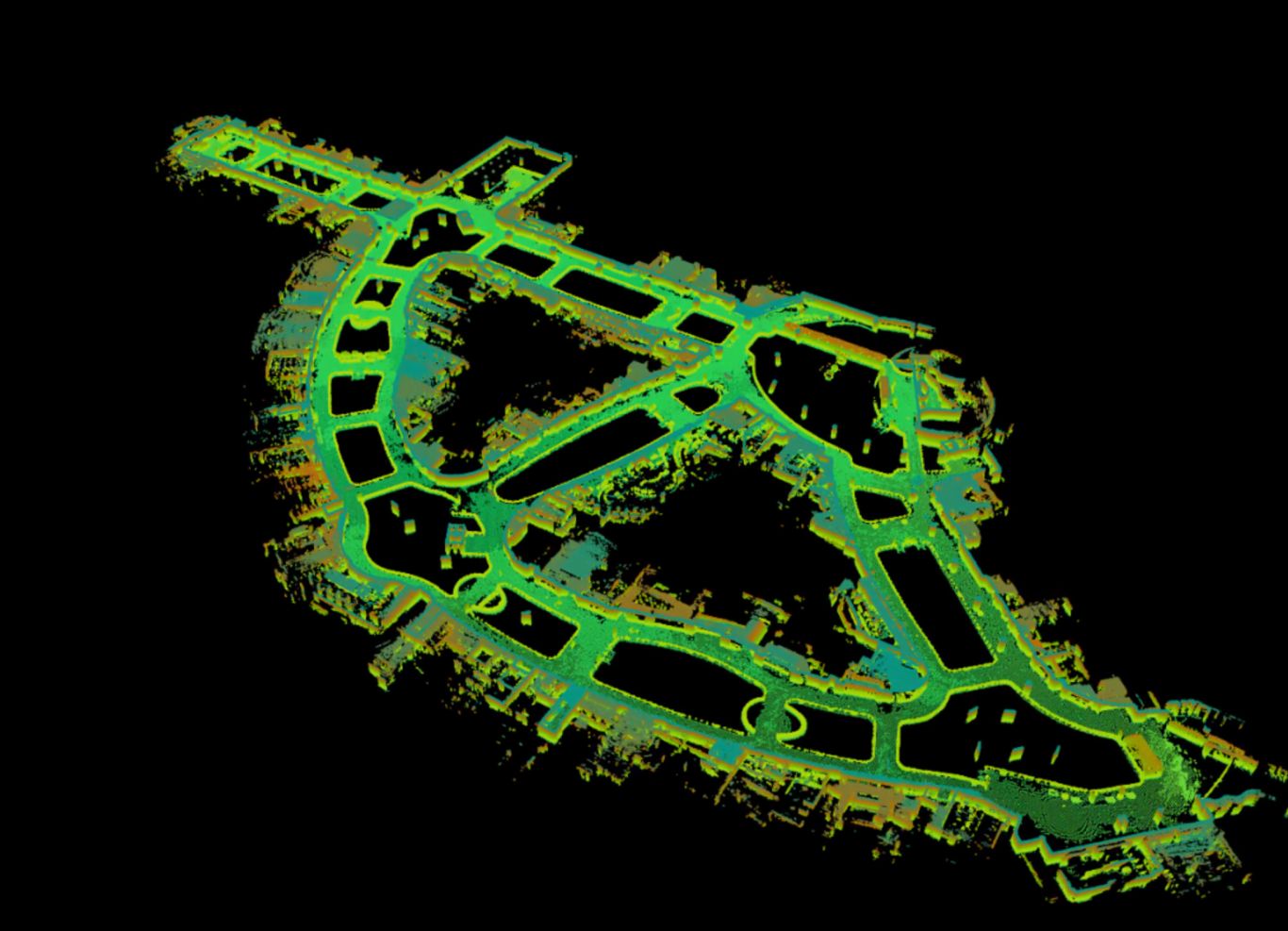
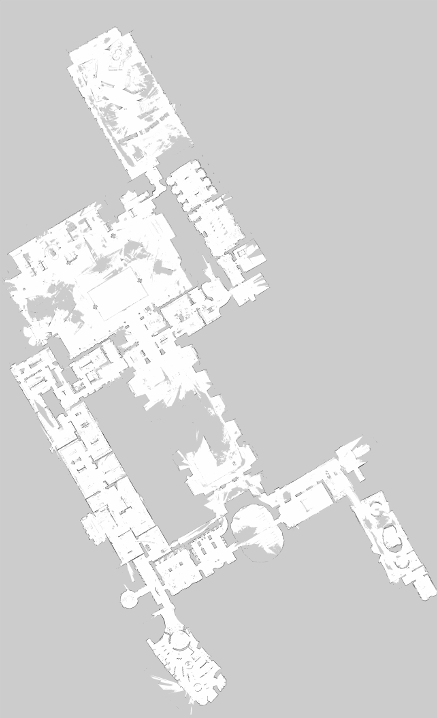
cartographer 2D与3D建图与定位
将二维码或室内 gps 信息的作为 landmark 的导入,并在实际车上完成了基于 landmark 的建图和定位。理论上,使得基于 cartographer 的室内建图方案成型,使得几乎所有室内环境地图可建。完成了单舵轮与差速导航与 cartographer 定位的融合建图在数据集测 试完成了三千平米与万平米的地图构建。对一些极端环境做了测评,确定了建大场景地 图与极端环境地图的方案。
成功将反光柱与信息引入 cartographer 建图。 探索了将二维码地图真值信息融入 SLAM 地图的方案。
开发了视觉与雷达联合建图的初步算法工程,使用 ORB_SLAM 配合雷达建图后的定位信 息存储视觉关键帧,用以机器人重定位。
案例图片
相似案例推荐
其他人才的相似案例推荐
-

AI智能名片
源码包含: AI智能名片小程序+智能CRM管理小程序+智能
-

机器人仿真系统
负责:核心模块开发和项目主导; 主要语言:c++, qt;
-

机器人系统
机器人系统(linux环境)核心开发(主控,状态机,线程),
-

997
??????????????????????????????
-

996
.。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
-

python数据分析展示
负责项目的后端设计,代码实现,前端报表的实现。项目分析机器人
-

叉车控制系统
我负责的是叉车控制系统的开发,接收上层指令,自由决定任务的完
-

电话小秘,彩球大作战,怪兽消除
主要负责前端功能开发,h5,小程序,pc端,移动端,和接后台
-

微信公众号-法律咨询智能问答系统
该功能可以使微信公众号具有智能回答的功能,当前功能赋予了公众
-

流媒体增益处理
职责描述: 基于 AudioContext 对音频多媒体的
-

机器人签到
机器人签到,主要是用ssm框架写的后端,用于负责实验室的同学
-

微信机器人项目
服务于平安银行金融理财客户经理,提供微信端的金融知识快捷回复
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

