自动驾驶小车、智能摄像头

案例介绍
一、智能移动机器人项目
项目描述:该项目为个人主导的一个智能移动机器人控制系统,项目框架使用raspbian pi4平台下ros kinetic系统为主,以激光雷达,减速电机、摄像头等传感器为辅进行开发设计,大致流程为开机系统启动激光雷达进行地图的构建,配合上位机下达的指令进行自主导航或定向巡航,该系统所具备的功能有:
1、rplidar激光雷达功能包进行地图构建;
2、配合构建的地图进行SLAM自主导航、避障及定向巡航;
3、使用rviz、URDF及Gazebo等工具进行机器人的建模与仿真;
4、机器语音及视觉等功能;
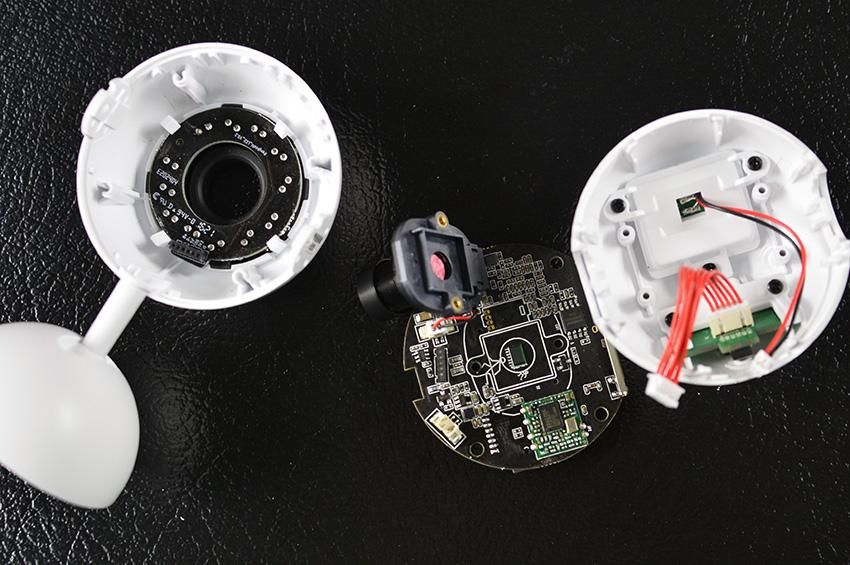
二、 智能摄像头项目
项目描述:该项目为个人主导的一个智能监控系统,该系统可实现红外报警、远程监控、双向语音通话及人脸识别等功能,目前项目设计基本完成
案例图片

相似案例推荐
其他人才的相似案例推荐
-

洛祺管理后台
洛祺管理后台是酒店服务人员为客人抢单派单,管理机器人,更改机
-

表格分析工具
此工具能够实现表格批量分割,自动设置分割步长设置存储路径
-

对话机器人
负责知识图谱的构建,包括实体链接,实体消歧等 负责意图识别
-

官网设计
描述: 基于投资方的需求,公司需要开发一套移动端的官网展现
-

保密要求无法上传
保密要求无法上传保密要求无法上传保密要求无法上传保密要求无法
-

2020作品集合集
描述: 快学题库是一套一建、二建自学的小程序和网站。其痛点
-

机器人智能巡检系统
系统描述: 机器人智能巡检系统主要功能是编辑巡检点信息,将
-

科沃斯机器人中台设计
负责科沃斯机器人中台UI视觉风格、用户交互设计等工作; 可
-

表面缺陷检测系统
项目意义:CTP技术主要应用于数字印刷行业,具有高附加值的C
-

侣程科技公司官方网站
公司官方网站的正常迭代升级 1.负责产品UI视觉升级,包括
-

侣程科技公司官方网站
公司官方网站的正常迭代升级 1.负责产品UI视觉升级,包括
-

侣程科技公司官方网站
公司官方网站的正常迭代升级 1.负责产品UI视觉升级,包括
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

