
案例介绍
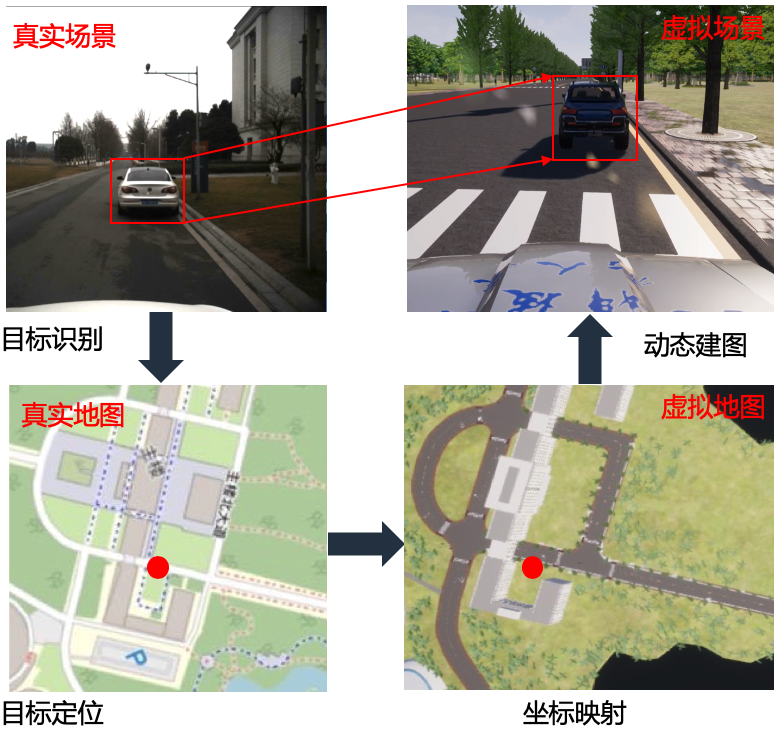
针对人工智能算法在实车实路条件下验证难度大风险高的问题,本文提出了一种仿真场景中的动态交通流生成方法。论文借鉴“平行测试”的理念,基于已搭建完成的仿真平台和静态仿真场景,构建出虚实融合的半真实仿真测试场景,将真实交通流数据同步至仿真场景中,解决算法验证过程中对场景的随机性、真实性的需求,提高保障测试安全的同时,提高测试效率。在构建车路协同的半真实仿真场景系统中,面临道路目标场景理解的难题。为此,论文结合“路端传感器”、“边缘计算”两种关键技术,在虚拟的静态道路场景中动态的生成接近真实的交通流场景信息。
案例图片

相似案例推荐
其他人才的相似案例推荐
-

睡啦商务版
睡啦商务版: 睡啦助眠机器人商务版小程序,主要对应操作睡啦助
-

睡啦商务版
睡啦商务版: 睡啦助眠机器人商务版小程序,主要对应操作睡啦助
-

机器人绘制肖像画
使用py-opencv开发视觉软件抓取人体特征点并处理为线条
-

双臂,夹爪,相机结合检测及抓取摆放工站
使用两台六轴协作机器人,适配慧灵夹爪,海康工业智能相机,做视
-

智呼管理中心
通过语音转文字和文字转语音,实现人与机器人对话。 通过预料
-

6自由度机械臂二次开发
完成机械臂的二次开发工作:其中包括视觉引导、网络通信的开发、
-

TH系列机器人控制软件
软件功能:控制中科探海全系列水下机器人,具有数据回传显示,机
-

python自动实现直播答题竞猜
1. 将手机投射到pc笔记本上,打开直播答题平台的在线直播
-

基于scraino的幼儿教育编程
以上图片是基于kadapapa的少儿机器人教育产品,scra
-

智能科技Temi
智能科技Temi是以色列的一家国际化科技公司,专注于智能机器
-

机器人端业务
1. 首页模块采用自定义listview实现需求;使用百度地
-

运动目标识别
识别场景里面的目标(运动目标&动态目标),并进行跟踪
微信接收人才推送
关注猿急送微信平台,接收实时人才推送

接收人才推送

联系需求方端客服